2. MIPI 使用指南¶
2.1. 概述¶
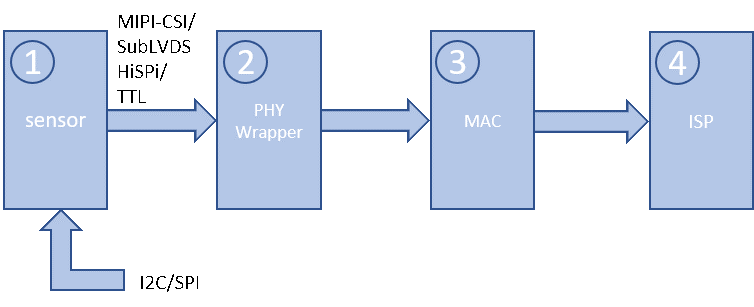
MIPI Rx可接收差分与DC(TTL)接口数据, 并将数据转换成pixel数据后传给下一级的ISP模块。 差分讯号支持SubLVDS(Sub Low-Voltage Differential Signal), MIPI-CSI与HiSPi(High-Speed Serial Pixel Interface)等视频输入。DC讯号支持Sensor RAW12, BT1120, BT656与BT601。
2.2. 重要概念¶
MIPI
移动行业处理器接口-Mobile Industry Processor Interface,MIPI特指物理层使用D-PHY传输规范并使用CSI-2为协议层的通信接口。
Lane
物理层用于连接发送端和接收端的一对高速差分线。一个Lane可传送时钟或数据。1C4D指一个时钟Lane及4个资料Lane。
LVDS
低压差分信号(Low Voltage differential Signaling),这里的LVDS泛指LVDS发展的sub-LVDS与HiSPi,通过同步码区分消隐区和有效数据。
同步码
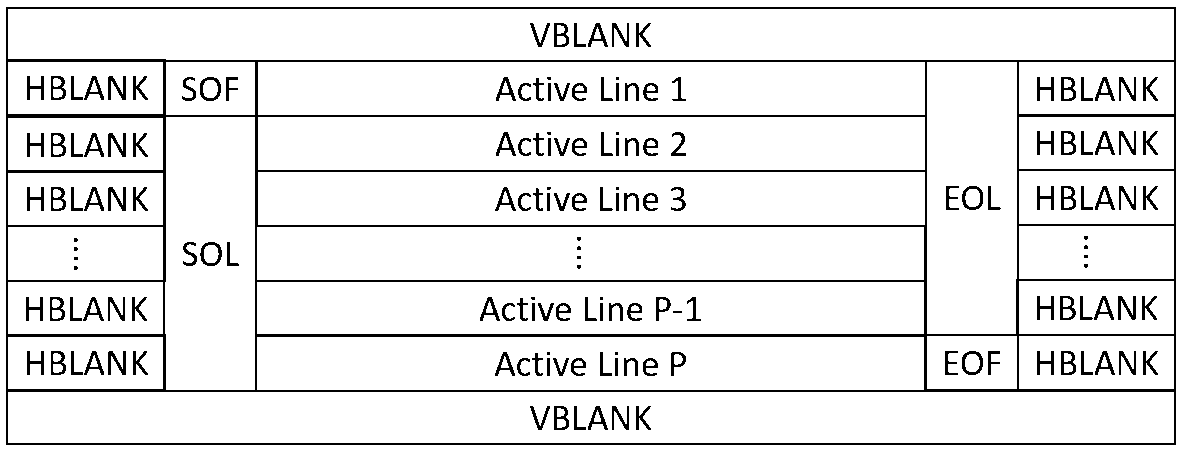
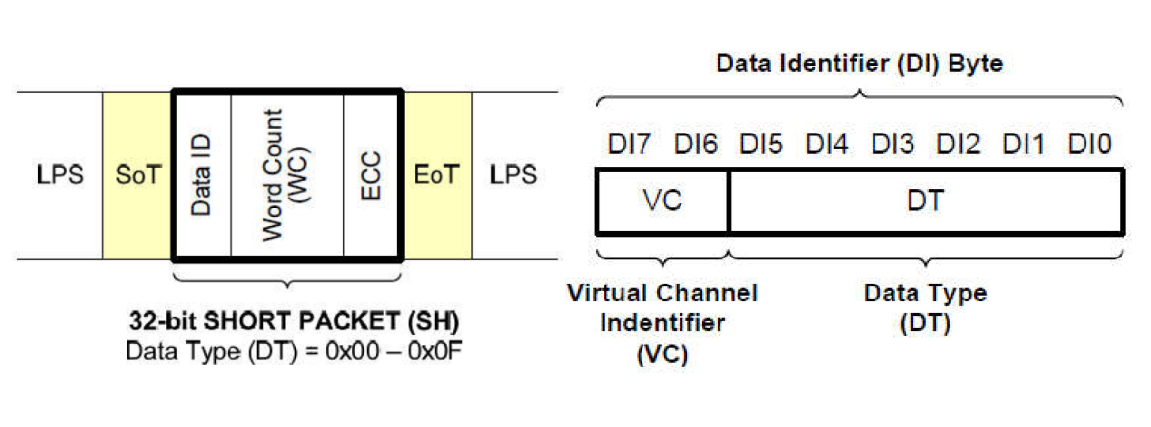
MIPI-CSI利用标准的短包(Short Packet)当做同步讯号。 LVDS讯号利用同包码(Sync Code)作为同步讯号。 LVDS有两种同步模式:
使用SOF/EOF表示一帧的开始与结束。
使用SOL/EOL表示行的开始与结束。
图 1‑1 SOF/EOF/SOL/EOL同步方式
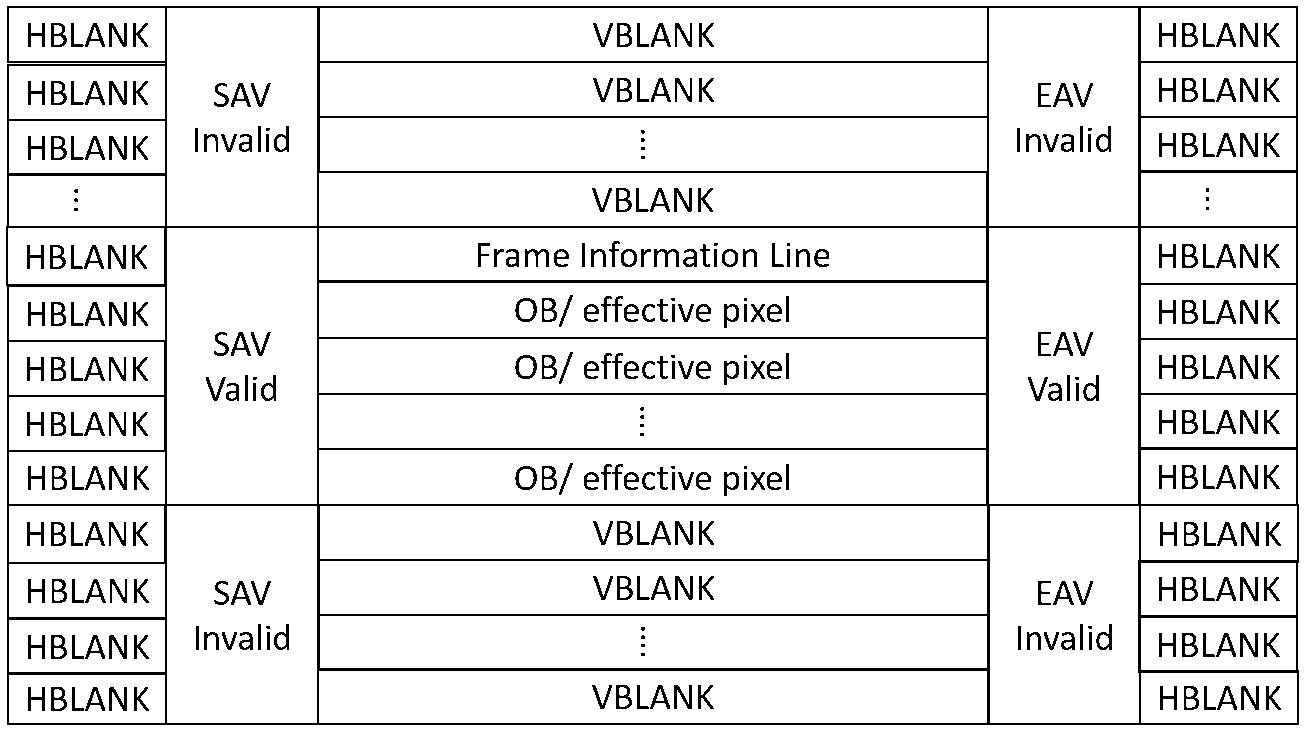
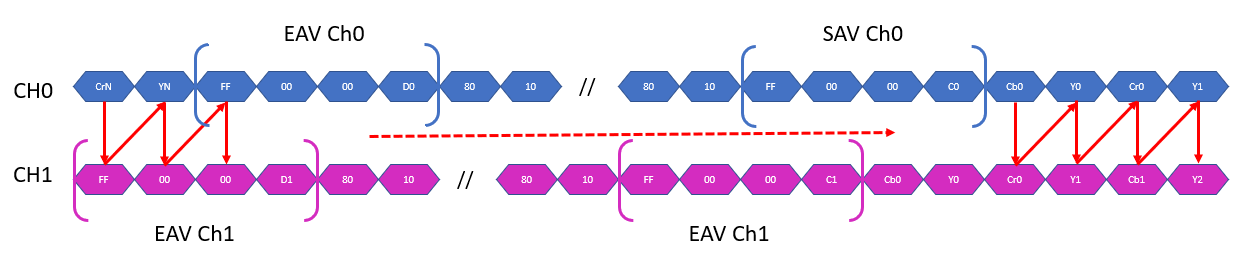
使用SAV invalid与EAV invalid表示VBLANK的开始与结束。 使用SAV valid与EAV valid表示有效数据(information line, H.OB与pixel data)的开始与结束。
图 1‑2 SAV/EAV同步方式
DOI
SONY的交错式WDR模式,全称为Digital Overlap。
2.3. 功能描述¶
MIPI RX支持一路最大4 lanes或两路最大2 lanes的MIPI-CSI,sub-LVDS 与HiSPi差分视频输入接口,接口支持lane互换与差分讯号的PN互换。注意若使用两路差分讯号输入,脚位MIPIRX#必须0到2同一组输入,3到5同一组输入。MIPI RX也支持sensor TTL,BT1120,BT656与BT601等平行输入接口,支持除了Clock以外的lane功能互换。 具体的Lane分布如下表:
表 1‑1 支持BT接口分布表. BGA封装支持VI0~VI2, QFN封装支持VI0.
VIO |
PAD NAME |
VI1 |
PAD NAME |
VI2 |
PAD NAME |
|---|---|---|---|---|---|
VIO_CLK |
MIPIRX4N |
VI1_CLK |
VIVO_CLK |
VI2_CLK |
VIDO_CLK |
VI0_D[0] |
MIPIRX4P |
VI1_D[0] |
VIVO_D0 |
VI2_D[0] |
VIVO_D0 |
VI0_D[1] |
MIPIRX3N |
VI1_D[1] |
VIVO_D1 |
VI2_D[1] |
VIVO_D1 |
VI0_D[2] |
MIPIRX3P |
VI1_D[2] |
VIVO_D2 |
VI2_D[2] |
VIVO_D2 |
VI0_D[3] |
MIPIRX2N |
VI1_D[3] |
VIVO_D3 |
VI2_D[3] |
VIVO_D3 |
VI0_D[4] |
MIPIRX2P |
VI1_D[4] |
VIVO_D4 |
VI2_D[4] |
VIVO_D4 |
VI0_D[5] |
MIPIRX1N |
VI1_D[5] |
VIVO_D5 |
VI2_D[5] |
VIVO_D5 |
VI0_D[6] |
MIPIRX1P |
VI1_D[6] |
VIVO_D6 |
VI2_D[6] |
VIVO_D6 |
VI0_D[7] |
MIPIRX0N |
VI1_D[7] |
VIVO_D7 |
VI2_D[7] |
VIVO_D7 |
VI0_D[8] |
MIPIRX0P |
VI1_D[8] |
VIVO_D8 |
||
VI0_D[9] |
MIPI_TXM0 |
VI1_D[9] |
VIVO_D9 |
||
VI0_D[10] |
MIPI_TXP0 |
VI1_D[10] |
VIVO_D10 |
||
VI0_D[11] |
MIPI_TXM1 |
VI1_D[11] |
MIPIRX5N |
||
VI0_D[12] |
MIPI_TXP1 |
VI1_D[12] |
MIPIRX5P |
||
VI0_D[13] |
MIPI_TXM2 |
VI1_D[13] |
MIPIRX4N |
||
VI0_D[14] |
MIPI_TXP2 |
VI1_D[14] |
MIPIRX4P |
||
VI1_D[15] |
MIPIRX3N |
||||
VI1_D[16] |
MIPIRX3P |
||||
VI1_D[17] |
MIPIRX2N |
||||
VI1_D[18] |
MIPIRX2P |
MIPI RX支持MIPI-CSI的解多任务 (CSI Demux),可接收不同channel ID的信道数据。
图 1-3 MIPI-CSI 的channel ID
MIPI RX支持BT接口的解多任务 (BT Demux),输入端将不同信道的数据以BT656字节交错的格式打包,MIPI RX可还原各通道再以对应的同步码解出有效数据。注意此模式只支持单沿取样(SDR)。
图 1‑4 BT demux模式支持的输入
2.4. API 参考¶
MIPI Rx提供对接sensor 时序的功能。 提供ioctl接口,可用的命令如下:
CVI_MIPI_SET_HS_MODE :CVI_MIPI_SET_HS_MODE: 设置MIPI的Lane分布模式。
CVI_MIPI_SET_DEV_ATTR :设置MIPI和并口设备属性。
CVI_MIPI_RESET_SENSOR :复位sensor。
CVI_MIPI_UNRESET_SENSOR :撤销复位sensor。
CVI_MIPI_RESET_MIPI :复位MIPI Rx。
CVI_MIPI_ENABLE_SENSOR_CLOCK :打开SENSOR的时钟。
CVI_MIPI_DISABLE_SENSOR_CLOCK :关闭SENSOR的时钟。
CVI_MIPI_SET_CROP_TOP :舍弃每帧中的首N条资料。
CVI_MIPI_SET_WDR_MANUAL :打开WDR手动模式。
CVI_MIPI_SET_LVDS_FP_VS :设定LVDS中VSYNC生成的时间点。
MIPI Tx提供对接显示屏、级联的功能。
其中单系统提供了ioctl接口,可通过传输以下相关命令进行相应的配置:
CVI_VIP_MIPI_TX_SET_DEV_CFG :设置MIPI Tx设备的属性。
CVI_VIP_MIPI_TX_GET_CMD :从MIPI Tx设备读取信息。
CVI_VIP_MIPI_TX_SET_CMD :设备发送命令给MIPI Tx设备。
CVI_VIP_MIPI_TX_ENABLE :启用MIPI Tx设备。
CVI_VIP_MIPI_TX_DISABLE :禁用MIPI Tx设备。
CVI_VIP_MIPI_TX_SET_HS_SETTLE :设定MIPI Tx在HS mode下的settle timing。
CVI_VIP_MIPI_TX_GET_HS_SETTLE :取得MIPI Tx在HS mode下的settle timing。
双系统提供了CVI_MSG_SendSync接口,可通过传输以下相关命令进行相应的配置:
MSG_CMD_MIPI_TX_SET_DEV_CFG :设置MIPI Tx设备的属性。
MSG_CMD_MIPI_TX_GET_CMD :从MIPI Tx设备读取信息。
MSG_CMD_MIPI_TX_SET_CMD :设备发送命令给MIPI Tx设备。
MSG_CMD_MIPI_TX_ENABLE :启用MIPI Tx设备。
MSG_CMD_MIPI_TX_DISABLE :禁用MIPI Tx设备。
MSG_CMD_MIPI_TX_SET_HS_SETTLE :设定MIPI Tx在HS mode下的settle timing。
MSG_CMD_MIPI_TX_GET_HS_SETTLE :取得MIPI Tx在HS mode下的settle timing。
2.4.1. CVI_MIPI_SET_HS_MODE¶
【描述】
相关功能被CVI_MIPI_SET_DEV_ATTR取代。
2.4.2. CVI_MIPI_SET_DEV_ATTR¶
【描述】
设置MIPI和并口设备属性。
【参数】
#define CVI_MIPI_SET_DEV_ATTR _IOW(CVI_MIPI_IOC_MAGIC, 0x01, struct combo_dev_attr_t)
【定义】
struct combo_dev_attr_t类型的指针。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
配置CVI_MIPI_SET_DEV_ATTR之前, 需要使用ISP接口打开MIPI_RX时钟. 详情请见ISP相关文件。
除了配置CVI_MIPI_SET_DEV_ATTR之前, 还需要配置以下接口。
复位MIPI: 接口为CVI_MIPI_RESET_MIPI。
打开Sensor的时钟: 接口为CVI_MIPI_ENABLE_SENSOR_CLOCK
复位Sensor: 接口为CVI_MIPI_RESET_SENSOR
撤销复位Sensor: 接口为CVI_MIPI_UNRESET_SENSOR
推荐的配置流程如下:
打开ISP时钟。
复位对接的Sensor。
复位MIPI Rx。
配置MIPI Rx设备属性。
打开Sensor所连接的时钟。
撤销复位对接的Sensor。
推荐的退出程序如下:
复位对接的Sensor。
关闭Sensor所连接的时钟。
复位MIPI Rx。
关闭ISP时钟。
操作Sensor复位信号线和时钟信号线会对所连接到该信号线的所有Sensor都产生效果。
【相关数据类型及接口】
CVI_MIPI_RESET_MIPI
CVI_MIPI_ENABLE_SENSOR_CLOCK关闭ISP时钟。
CVI_MIPI_DISABLE_SENSOR_CLOCK
CVI_MIPI_RESET_SENSOR
CVI_MIPI_UNRESET_SENSOR
2.4.3. CVI_MIPI_RESET_SENSOR¶
【描述】
复位sensor
【定义】
#define CVI_MIPI_RESET_SENSOR _IOW(CVI_MIPI_IOC_MAGIC, 0x05, unsigned int)
【参数】
unsigned int。 Sensor复位信号线编号。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
Sensor复位信号绑定在对应的dts。
mipi_rx: cif
{
compatible = "cvitek,cif";
reg = <0x0 0x0a0c2000 0x0 0x2000>, <0x0 0x0a0d0000 0x0 0x1000>,<0x0 0x0a0c4000 0x0 0x2000>;
reg-names = "csi_mac0", "csi_wrap0", "csi_mac1";
interrupts = <GIC_SPI 155 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 156 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "csi0", "csi1";
snsr-reset = <&porta 2 GPIO_ACTIVE_LOW>, <&porta 2 GPIO_ACTIVE_LOW>;
resets = <&rst RST_CSIPHY0>, <&rst RST_CSIPHY1>,
<&rst RST_CSIPHY0RST_APB>, <&rst RST_CSIPHY1RST_APB>;
reset-names = "phy0", "phy1", "phy-apb0", "phy-apb1";
clocks = <&clk CV181X_CLK_CAM0>, <&clk CV181X_CLK_CAM1>, <&clk CV181X_CLK_SRC_VIP_SYS_2>;
clock-names = "clk_cam0", "clk_cam1", "clk_sys_2";
};
2.4.4. CVI_MIPI_UNRESET_SENSOR¶
【描述】
撤销复位sensor。
【定义】
#define CVI_MIPI_UNRESET_SENSOR _IOW(CVI_MIPI_IOC_MAGIC, 0x06, unsigned int)
【参数】
unsigned int。 Sensor复位信号线编号。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
Sensor复位信号绑定在对应的dts。
mipi_rx: cif
{
compatible = "cvitek,cif";
reg = <0x0 0x0a0c2000 0x0 0x2000>, <0x0 0x0a0d0000 0x0 0x1000>,
<0x0 0x0a0c4000 0x0 0x2000>;
reg-names = "csi_mac0", "csi_wrap0", "csi_mac1";
interrupts = <GIC_SPI 155 IRQ_TYPE_LEVEL_HIGH>,
<GIC_SPI 156 IRQ_TYPE_LEVEL_HIGH>;
interrupt-names = "csi0", "csi1";
snsr-reset = <&porta 2 GPIO_ACTIVE_LOW>, <&porta 2 GPIO_ACTIVE_LOW>;
resets = <&rst RST_CSIPHY0>, <&rst RST_CSIPHY1>,
<&rst RST_CSIPHY0RST_APB>, <&rst RST_CSIPHY1RST_APB>;
reset-names = "phy0", "phy1", "phy-apb0", "phy-apb1";
clocks = <&clk CV181X_CLK_CAM0>, <&clk CV181X_CLK_CAM1>, <&clk CV181X_CLK_SRC_VIP_SYS_2>;
clock-names = "clk_cam0", "clk_cam1", "clk_sys_2";
};
2.4.5. CVI_MIPI_RESET_MIPI¶
【描述】
复位MIPI_Rx。
【定义】
#define CVI_MIPI_RESET_MIPI _IOW(CVI_MIPI_IOC_MAGIC, 0x07, unsigned int)
【参数】
unsigned int。 MIPI_Rx设备号。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
无
2.4.6. CVI_MIPI_ENABLE_SENSOR_CLOCK¶
【描述】
打开Sensor的时钟。
【定义】
#define CVI_MIPI_ENABLE_SENSOR_CLOCK _IOW(CVI_MIPI_IOC_MAGIC, 0x10, unsigned int)
【参数】
unsigned int。 MIPI_Rx设备号。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
无
2.4.7. CVI_MIPI_DISABLE_SENSOR_CLOCK¶
【描述】
关闭Sensor的时钟。
【定义】
#define CVI_MIPI_DISABLE_SENSOR_CLOCK _IOW(CVI_MIPI_IOC_MAGIC, 0x11, unsigned int)
【参数】
unsigned int。 MIPI_Rx设备号。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
无
2.4.8. CVI_MIPI_SET_CROP_TOP¶
【描述】
舍弃每帧中的首N条资料
【定义】
#define CVI_MIPI_SET_WDR_MANUAL _IOW(CVI_MIPI_IOC_MAGIC, 0x21, struct crop_top_s)
【参数】
struct crop_top_s
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
无
2.4.9. CVI_MIPI_SET_WDR_MANUAL¶
【描述】
打开WDR手动模式。
【定义】
#define CVI_MIPI_SET_WDR_MANUAL _IOW(CVI_MIPI_IOC_MAGIC, 0x21, struct manual_wdr_s)
【参数】
struct manual_wdr_s
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
无
2.4.10. CVI_MIPI_SET_LVDS_FP_VS¶
【描述】
设定sub-LVDS中VSYNC生成的时间点。
【定义】
#define CVI_MIPI _SET_LVDS_FP_VS _IOW(CVI_MIPI_IOC_MAGIC, 0x22, struct vsync_gen_s)
【参数】
struct vsync_gen_s
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_vip_cif.h
【注意】
无
2.4.11. CVI_VIP_MIPI_TX_SET_DEV_CFG¶
【描述】
设置MIPI Tx设备的属性。
【定义】
#define CVI_VIP_MIPI_TX_SET_DEV_CFG _IOW(CVI_VIP_MIPI_TX_IOC_MAGIC, 0x01, struct combo_dev_cfg_s)
【参数】
MIPI Tx设备属性结构体,详见combo_dev_cfg_s结构体说明。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_mipi_tx.h
【注意】
无
2.4.12. MSG_CMD_MIPI_TX_SET_DEV_CFG¶
该双系统命令的描述、参数、返回值、处理器差异、需求、注意项皆与单系统命令CVI_VIP_MIPI_TX_SET_DEV_CFG相同。
【定义】
typedef enum tagMSG_MIPI_TX_CMD_E {
MSG_CMD_MIPI_TX_SET_DEV_CFG = 0,
MSG_CMD_MIPI_TX_SET_CMD,
MSG_CMD_MIPI_TX_GET_CMD,
MSG_CMD_MIPI_TX_ENABLE,
MSG_CMD_MIPI_TX_DISABLE,
MSG_CMD_MIPI_TX_SET_HS_SETTLE,
MSG_CMD_MIPI_TX_GET_HS_SETTLE,
MSG_CMD_MIPI_TX_BUFF
} MSG_MIPI_TX_CMD_E;
双系统后续命令的定义都来自该枚举,不再叙述。
2.4.13. CVI_VIP_MIPI_TX_GET_CMD¶
【描述】
从MIPI Tx设备读取信息。
【定义】
#define CVI_VIP_MIPI_TX_GET_CMD _IOWR(CVI_VIP_MIPI_TX_IOC_MAGIC, 0x04, struct get_cmd_info_s)
【参数】
详见get_cmd_info_s结构体说明
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_mipi_tx.h
【注意】
无
2.4.14. MSG_CMD_MIPI_TX_GET_CMD¶
该双系统命令的描述、参数、返回值、处理器差异、需求、注意项皆与单系统命令CVI_VIP_MIPI_TX_GET_CMD相同。
【定义】
见MSG_CMD_MIPI_TX_SET_DEV_CFG命令的定义说明。
2.4.15. CVI_VIP_MIPI_TX_SET_CMD¶
【描述】
设备发送命令给MIPI Tx设备。
【定义】
单系统:
#define CVI_VIP_MIPI_TX_SET_CMD _IOW(CVI_VIP_MIPI_TX_IOC_MAGIC, 0x02, struct cmd_info_s)
【参数】
详见cmd_info_s 结构体说明。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_mipi_tx.h
【注意】
无
2.4.16. MSG_CMD_MIPI_TX_SET_CMD¶
该双系统命令的描述、参数、返回值、处理器差异、需求、注意项皆与单系统命令CVI_VIP_MIPI_TX_SET_CMD相同。
【定义】
见MSG_CMD_MIPI_TX_SET_DEV_CFG命令的定义说明。
2.4.17. CVI_VIP_MIPI_TX_ENABLE¶
【描述】
启用MIPI Tx设备。
【定义】
#define CVI_VIP_MIPI_TX_ENABLE _IO(CVI_VIP_MIPI_TX_IOC_MAGIC, 0x03)
【参数】
无
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_mipi_tx.h
【注意】
无
2.4.18. MSG_CMD_MIPI_TX_ENABLE¶
该双系统命令的描述、参数、返回值、处理器差异、需求、注意项皆与单系统命令CVI_VIP_MIPI_TX_ENABLE相同。
【定义】
见MSG_CMD_MIPI_TX_SET_DEV_CFG命令的定义说明。
2.4.19. CVI_VIP_MIPI_TX_DISABLE¶
【描述】
禁用MIPI Tx设备。
【定义】
#define CVI_VIP_MIPI_TX_DISABLE _IO(CVI_VIP_MIPI_TX_IOC_MAGIC, 0x05)
【参数】
无
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_mipi_tx.h
【注意】
无
2.4.20. MSG_CMD_MIPI_TX_DISABLE¶
该双系统命令的描述、参数、返回值、处理器差异、需求、注意项皆与单系统命令CVI_VIP_MIPI_TX_DISABLE相同。
【定义】
见MSG_CMD_MIPI_TX_SET_DEV_CFG命令的定义说明。
2.4.21. CVI_VIP_MIPI_TX_SET_HS_SETTLE¶
【描述】
设定MIPI Tx在HS mode下的settle timing。
【定义】
#define CVI_VIP_MIPI_TX_SET_HS_SETTLE _IOW(CVI_VIP_MIPI_TX_IOC_MAGIC, 0x06, struct hs_settle_s)
【参数】
详见hs_settle_s结构体说明。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_mipi_tx.h
【注意】
2.4.22. MSG_CMD_MIPI_TX_SET_HS_SETTLE¶
该双系统命令的描述、参数、返回值、处理器差异、需求、注意项皆与单系统命令CVI_VIP_MIPI_TX_SET_HS_SETTLE相同。
【定义】
见MSG_CMD_MIPI_TX_SET_DEV_CFG命令的定义说明。
2.4.23. CVI_VIP_MIPI_TX_GET_HS_SETTLE¶
【描述】
取得MIPI Tx在HS mode下的settle timing。
【定义】
#define CVI_VIP_MIPI_TX_GET_HS_SETTLE _IOWR(CVI_VIP_MIPI_TX_IOC_MAGIC, 0x06, struct hs_settle_s)
【参数】
详见hs_settle_s结构体说明。
【返回值】
返回值 |
描述 |
|---|---|
0 |
成功 |
-1 |
失败,并设置errno |
【处理器差异】
无
【需求】
头文件: cvi_mipi_tx.h
【注意】
2.4.24. MSG_CMD_MIPI_TX_GET_HS_SETTLE¶
该双系统命令的描述、参数、返回值、处理器差异、需求、注意项皆与单系统命令CVI_VIP_MIPI_TX_GET_HS_SETTLE相同。
【定义】
见MSG_CMD_MIPI_TX_SET_DEV_CFG命令的定义说明。
2.5. 数据类型¶
MIPI RX相关数据类型定义如下:
CVI_MIPI_IOC_MAGIC :MIPI Rx ioctl命令的幻数。
MIPI_LANE_NUM :MIPI Rx的MIPI设备支持的最大Lane数。
WDR_VC_NUM :定义最多支持的Virtual Channel数量。
SYNC_CODE_NUM :定义LVDS每个Virtual Channel的同步码数量。
input_mode_e :MIPI Rx输入接口类型。
img_size_s :MIPI Rx输入数据每帧的大小。
rx_mac_clk_e :MAC 的支持工作时钟。
cam_pll_freq_e :MIPI-RX输出的Sensor参考时钟。
mclk_pll_s :MIPI-RX输出的Sensor参考时钟设定。
raw_data_type_e :MIPI Rx输入数据格式。
mipi_wdr_mode_e :MIPI-CSI WDR模式。
wdr_mode_e :LVDS/HISPI WDR模式。
lvds_sync_mode_e :LVDS同步模式。
lvds_bit_endian :比特位大小端模式。
lvds_vsync_type_e :LVDS 在WDR模式的同步方式。
lvds_fid_type_e :LVDS frame identification ID类型
lvds_vsync_type_s: LVDS WDR同步参数
lvds_dev_attr_s: SubLVDS/HiSPi设备属性
dphy_s: MIPI DPHY 属性
mipi_demux_info_s: MIPI解多任务模式属性
mipi_dev_attr_s: MIPI-CSI设备属性
manual_wdr_attr_s: 手动WDR模式参数
ttl_pin_func_e: TTL/BT接口的配置功能
ttl_src_e: TTL/BT接口输入来源
bt_demux_mode_e: BT解多任务模式的信道数量
bt_demux_sync_s: BT解多任务模式的同步码配置
bt_demux_attr_s: BT解多任务模式的设备属性
ttl_dev_attr_s: TTL/BT设备属性
combo_dev_attr_s: combo 设备属性
crop_top_s: 舍弃开头的行数据属性
manual_wdr_s: 手动WDR模式设定
vsync_gen_s: SUBLVDS垂直同步信号属性
MIPI TX相关数据类型定义如下:
LANE_MAX_NUM: 一个MIPI Tx设备支持的最大Lane数
output_mode_e: MIPI Tx输出模式
video_mode_e: MIPI Tx视频模式
output_format_e: MIPI Tx输出格式
sync_info_s: MIPI Tx设备同步信息
combo_dev_cfg_s: MIPI Tx设备属性
cmd_info_s: 从MIPI Tx设备取回信息
get_cmd_info_s: 从MIPI Tx设备取回信息
hs_settle_s: MIPI Tx设备HS mode下的settle信息
2.5.1. CVI_MIPI_IOC_MAGIC¶
【说明】
MIPI Rx ioctl命令的幻数
【定义】
#define CVI_MIPI_IOC_MAGIC 'm'
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.2. MIPI_LANE_NUM¶
【说明】
一个MIPI Rx设备支持的最大Lane数。
【定义】
#define MIPI_LANE_NUM 4
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.3. WDR_VC_NUM¶
【说明】
定义最多支持的Virtual Channel数量
【定义】
#define WDR_VC_NUM 2
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.4. SYNC_CODE_NUM¶
【说明】
定义LVDS每个Virtual Channel的同步码数量。
【定义】
#define SYNC_CODE_NUM 4
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.5. BT_DEMUX_NUM¶
【说明】
定义使用bt demux功能时支持最大的信道数量。
【定义】
#define BT_DEMUX_NUM 4
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.6. MIPI_DEMUX_NUM¶
【说明】
定义使用mipi demux功能时支持最大的virtual channel数量。
【定义】
#define MIPI_DEMUX_NUM 4
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.7. input_mode_e¶
【说明】
MIPI Rx输入接口类型。
【定义】
enum input_mode_e
{
INPUT_MODE_MIPI = 0,
INPUT_MODE_SUBLVDS,
INPUT_MODE_HISPI,
INPUT_MODE_CMOS,
INPUT_MODE_BT1120,
INPUT_MODE_BT601_19B_VHS,
INPUT_MODE_BT656_9B,
INPUT_MODE_CUSTOM_0,
INPUT_MODE_BT_DEMUX,
INPUT_MODE_BUTT
};
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.8. img_size_s¶
【说明】
MIPI Rx输入数据每帧的大小。
【定义】
struct img_size_s {
unsigned int width;
unsigned int height;
};
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.9. rx_mac_clk_e¶
【说明】
MAC 的支持工作时钟。
【定义】
enum rx_mac_clk_e {
RX_MAC_CLK_200M = 0,
RX_MAC_CLK_400M,
RX_MAC_CLK_500M,
RX_MAC_CLK_600M,
RX_MAC_CLK_BUTT,
};
【处理器差异】
无。
【注意事项】
MAC时钟与支持的MIPI时钟关系请参考1.7.2。
【相关数据类型及接口】
无
2.5.10. cam_pll_freq_e¶
【说明】
MIPI-RX输出的Sensor参考时钟。
【定义】
enum cam_pll_freq_e {
CAMPLL_FREQ_NONE = 0,
CAMPLL_FREQ_37P125M,
CAMPLL_FREQ_25M,
CAMPLL_FREQ_27M,
CAMPLL_FREQ_24M,
CAMPLL_FREQ_26M,
CAMPLL_FREQ_NUM
};
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.11. mclk_pll_s¶
【说明】
MIPI-RX输出的Sensor参考时钟设定。
【定义】
struct mclk_pll_s {
unsigned int cam;
enum cam_pll_freq_e freq;
};
【成员】
成员 |
描述 |
|---|---|
cam |
0: 输出为CAM_MCLK0 1: 输出为CAM_MCLK1 |
freq |
输出的Sensor参考时钟 |
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.12. raw_data_type_e¶
【说明】
MIPI Rx输入数据格式。
【定义】
enum raw_data_type_e {
RAW_DATA_8BIT = 0,
RAW_DATA_10BIT,
RAW_DATA_12BIT,
YUV422_8BIT, /* MIPI-CSI only */
YUV422_10BIT, /* MIPI-CSI only*/
RAW_DATA_BUTT
};
【处理器差异】
无。
【注意事项】
YUV422_8BIT与YUV422_10BIT只支持MIPI-CSI格式。
【相关数据类型及接口】
无
2.5.13. mipi_wdr_mode_e¶
【说明】
MIPI-CSI WDR模式。
【定义】
enum mipi_wdr_mode_e {
CVI_MIPI_WDR_MODE_NONE = 0,
CVI_MIPI_WDR_MODE_VC,
CVI_MIPI_WDR_MODE_DT,
CVI_MIPI_WDR_MODE_DOL,
CVI_MIPI_WDR_MODE_MANUAL, /* SOI case */
CVI_MIPI_WDR_MODE_BUTT
};
【成员】
成员 |
描述 |
|---|---|
CVI_MIPI_WDR_MODE_NONE |
线性模式 |
CVI_MIPI_WDR_MODE_VC |
MIPI-CSI Virtual Channel模式 |
CVI_MIPI_WDR_MODE_DT |
MIPI-CSI Data Type模式 |
CVI_MIPI_WDR_MODE_DOL |
Sony DOL LI模式 |
CVI_MIPI_WDR_MODE_MANUAL |
WDR手动模式 |
【处理器差异】
无。
【注意事项】
CVI_MIPI_WDR_MODE_VC适用于使用MIPI-CSI Virtual Channel ID分辨长曝线与短曝线的Sensor。
CVI_MIPI_WDR_MODE_DT适用于使用MIPI-CSI Data Type ID分辨长曝线与短曝线的Sensor。 注意注意长曝与短曝必须在同一帧开始与结束。
CVI_MIPI_WDR_MODE_DOL适用于使用SONY MIPI-CSI Line Information模式。
CVI_MIPI_WDR_MODE_MANUAL使用自定义的规则决定长曝线与短曝线。
【相关数据类型及接口】
无
2.5.14. wdr_mode_e¶
【说明】
Sub-LVDS/HISPI WDR模式。
【定义】
enum wdr_mode_e {
CVI_WDR_MODE_NONE = 0,
CVI_WDR_MODE_2F,
CVI_WDR_MODE_3F,
CVI_WDR_MODE_DOL_2F,
CVI_WDR_MODE_DOL_3F,
CVI_WDR_MODE_DOL_BUTT
};
【成员】
成员 |
描述 |
|---|---|
CVI_WDR_MODE_NONE |
线性模式 |
CVI_WDR_MODE_2F |
一般双曝WDR |
CVI_WDR_MODE_3F |
一般三曝WDR |
CVI_WDR_MODE_DOL_2F |
Sony DOL-2 WDR |
CVI_WDR_MODE_DOL_3F |
Sony DOL-3 WDR |
【处理器差异】
无。
【注意事项】
CVI_WDR_MODE_2F适用于一般MIPI-CSI/HiSPi的交错式WDR。
CVI_WDR_MODE_DOL_2F适合用Sony Sub-LVDS DOL-2 WDR
CV181x不支援CVI_WDR_MODE_3F与CVI_WDR_MODE_DOL_3
CV180X不支持WDR mode
【相关数据类型及接口】
无
2.5.15. lvds_sync_mode_e¶
【说明】
LVDS同步模式。
【定义】
enum lvds_sync_mode_e {
LVDS_SYNC_MODE_SOF = 0,
LVDS_SYNC_MODE_SAV,
LVDS_SYNC_MODE_BUTT
};
【成员】
成员 |
描述 |
|---|---|
LVDS_SYNC_MODE_SOF |
SOF, EOF, SOL, EOL。 请参考图1-1 |
LVDS_SYNC_MODE_SAV |
Invalid SAV, invalid EAV, valid SAV, valid EAV。 请参考图1-2 |
【处理器差异】
无。
【注意事项】
LVDS_SYNC_MODE_SOF适用于HiSPi Packetize-SP模式。
LVDS_SYNC_MODE_SAV适用于sub-LVDS与HiSPi Streaming-SP模式
当输入为INPUT_MODE_HISPI并且同步模式为LVDS_SYNC_MODE_SAV。 MIPI-Rx切换到HiSPi Streaming-SP模式。
【相关数据类型及接口】
无
2.5.16. lvds_bit_endian¶
【说明】
比特位大小端模式。
【定义】
enum lvds_bit_endian {
LVDS_ENDIAN_LITTLE = 0,
LVDS_ENDIAN_BIG,
LVDS_ENDIAN_BUTT
};
【处理器差异】
无。
【注意事项】
无。
【相关数据类型及接口】
无
2.5.17. lvds_vsync_type_e¶
【说明】
LVDS 在WDR模式的同步方式。
【定义】
enum lvds_vsync_type_e {
LVDS_VSYNC_NORMAL = 0,
LVDS_VSYNC_SHARE,
LVDS_VSYNC_HCONNECT,
LVDS_VSYNC_BUTT
};
【成员】
成员 |
描述 |
|---|---|
LVDS_VSYNC_NORMAL |
长短曝光帧有独立的SOF-EOF, SOL-EOL或invalid-SAV-invalid-EAV, valid SAV-valid EAV。 |
LVDS_VSYNC_SHARE |
长短曝光帧共享一对SOF-EOF标识,短曝光的起始几行用固定值填充。 |
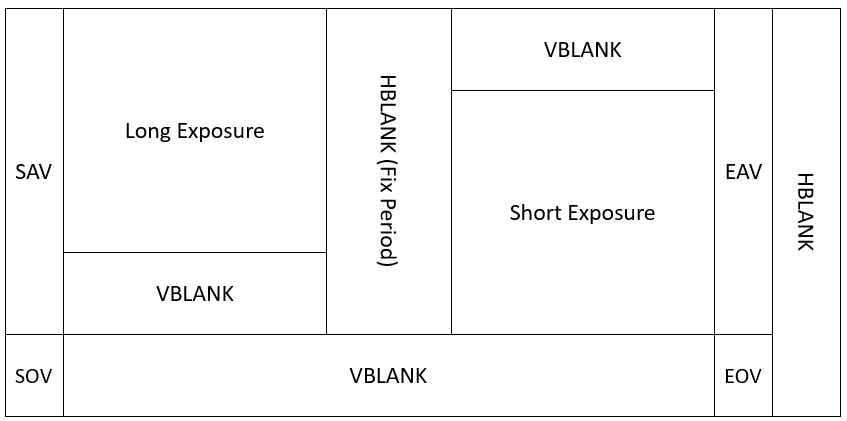
LVDS_VSYNC_HCONNECT |
长短曝光帧共享一对SAV-EAV标识,长短曝光帧之间是固定周期的消隐。 |
图 1‑3 LVDS_VSYNC_NORMAL同步方式.
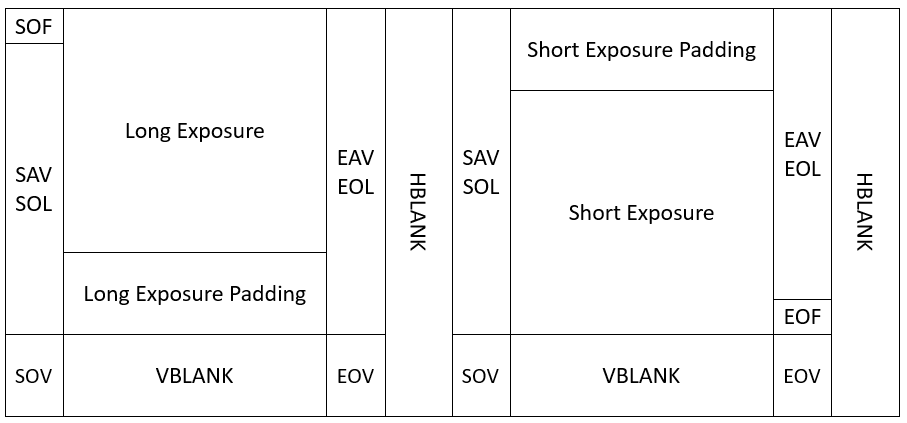
图 1‑4 LVDS_VSYNC_HCONNECT同步方式.
【处理器差异】
无。
【注意事项】
LVDS_VSYNC_NORMAL适用于SONY sub-LVDS DOL-2 pattern 1与HiSPi Packtized-SP WDR模式。
LVDS_VSYNC_SHARE适用于HiSPi Streaming-SP WDR模式。
LVDS_VSYNC_HCONNECT适用于SONY sub-LVDS DOL-2 pattern 2。
【相关数据类型及接口】
无
2.5.18. lvds_fid_type_e¶
【说明】
LVDS frame identification ID类型。
【定义】
enum lvds_fid_type_e {
LVDS_FID_NONE = 0,
LVDS_FID_IN_SAV,
LVDS_FID_BUTT,
};
【成员】
成员 |
描述 |
|---|---|
LVDS_FID_NONE |
不使用frame identification id。 |
LVDS_FID_IN_SAV |
FID插入在SAV第4个字段中。 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.19. lvds_fid_type_s¶
【说明】
LVDS frame identification ID类型。
【定义】
struct lvds_fid_type_s {
enum lvds_fid_type_e fid;
};
【成员】
成员 |
描述 |
|---|---|
fid |
LVDS DOL模式下的frame identification类型 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.20. lvds_vsync_type_s¶
【说明】
LVDS WDR同步参数。
【定义】
struct lvds_vsync_type_s {
enum lvds_vsync_type_e sync_type;
unsigned short hblank1;
unsigned short hblank2;
};
【处理器差异】
无。
【注意事项】
当sync_type为LVDS_VSYNC_HCONNECT时, 需要配置hblank1和hblank2,表示长短曝间的消隠区长度。
【相关数据类型及接口】
无
2.5.21. lvds_dev_attr_s¶
【说明】
LVDS/SubLVDS/HiSPi设备属性。
【定义】
struct lvds_dev_attr_s {
enum wdr_mode_e wdr_mode;
enum lvds_sync_mode_e sync_mode;
enum raw_data_type_e raw_data_type;
enum lvds_bit_endian data_endian;
enum lvds_bit_endian sync_code_endian;
short lane_id[MIPI_LANE_NUM+1];
short sync_code[MIPI_LANE_NUM][WDR_VC_NUM+1][SYNC_CODE_NUM];
struct lvds_vsync_type_s vsync_type;
struct lvds_fid_type_s fid_type;
char pn_swap[MIPI_LANE_NUM+1];
};
【成员】
成员 |
描述 |
|---|---|
wdr_mode |
WDR模式 |
sync_mode |
LVDS同步模式 |
raw_data_type |
传输的数据类型 |
data_endian |
数据大小端模式 |
sync_code_endian |
同步码大小端模式 |
lane_id |
发送端(sensor)和接收端(MIPI Rx) lane的对应关系 |
sync_code |
每个Virtual Channel有4个同步码,根据同步模式不同,分别表示SOF/EOF/ SOL/EOL的同步码或者invalid SAV/invalid EAV/ valid SAV/valid EAV的同步码。 |
vsync_type |
vsync类型,当wdr_mod为DOL模式并且sync_mode为LVDS_SYNC_MODE_SAV时,需要配置vsync的类型。 |
fid_type |
frame identification类型 |
pn_swap |
Positive/negative line 是否交换 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.22. dphy_s¶
【说明】
MIPI RX DPHY 属性。
【定义】
struct mipi_dev_attr_s {
unsigned char enable;
unsigned char hs_settle;
};
【成员】
成员 |
描述 |
|---|---|
enable |
开启MIPI RX DPHY属性设定 |
hs_settle |
hs settle time |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.23. mipi_demux_info_s¶
【说明】
MIPI CSI使用Virtual Channel 解多任务的属性设定。
【定义】
struct mipi_demux_info_s {
unsigned int demux_en;
unsigned char vc_mapping[MIPI_DEMUX_NUM];
};
【成员】
成员 |
描述 |
|---|---|
demux_en |
开启mipi virtual channel 解多任务 |
vc_mapping |
设定ISP channel 与mipi virtual channel对应关系. 例如vc_mapping = {0, 2, 3, 1}, ISP ch0代表vc=0; ch1代表vc=2; ch2代表vc=3; ch3代表vc=1. |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.24. mipi_dev_attr_s¶
【说明】
MIPI-CSI设备属性。
【定义】
struct mipi_dev_attr_s {
enum raw_data_type_e raw_data_type;
short lane_id[MIPI_LANE_NUM+1];
enum mipi_wdr_mode_e wdr_mode;
short data_type[WDR_VC_NUM];
char pn_swap[MIPI_LANE_NUM+1];
};
【成员】
成员 |
描述 |
|---|---|
wdr_mode |
WDR模式 |
raw_data_type |
传输的数据类型 |
lane_id |
发送端(sensor)和接收端(MIPI Rx) lane的对应关系 |
data_type |
当WDR模式为CVI_MIPI_WDR_MODE_DT时, 每个WDR frames对应的data type。 |
pn_swap |
Positive/negative line 是否交换。 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.25. manaul_wdr_attr_s¶
【说明】
手动WDR模式参数。
【定义】
struct manaul_wdr_attr_s {
unsigned int manual_en;
unsigned short l2s_distance;
unsigned short lsef_length;
unsigned int discard_padding_lines;
unsigned int update;
};
【成员】
成员 |
描述 |
|---|---|
manual_en |
手动WDR开关 |
l2s_distance |
一帧中首条长曝到首列短曝的距离, 单位为行数。 |
lsef_length |
长曝/短曝的行数。 |
discard_padding_lines |
Sensor是否有把padding行当有效行输出。 |
update |
是否强制更新设定。 若否, 设定会等下一张的同步讯号来才更新。 |
【处理器差异】
无。
【注意事项】
HiSPi输入并且sync_type为LVDS_VSYNC_SHARE时,需打开手动WDR模式并设定参数。
MIPI-CSI输入并且wdr mode为CVI_MIPI_WDR_MODE_MANUAL时,需打开手动WDR模式并设定参数。
【相关数据类型及接口】
无
2.5.26. ttl_pin_func_e¶
【说明】
TTL/BT接口的配置功能.
【定义】
enum ttl_pin_func_e {
TTL_PIN_FUNC_VS,
TTL_PIN_FUNC_HS,
TTL_PIN_FUNC_VDE,
TTL_PIN_FUNC_HDE,
TTL_PIN_FUNC_D0,
TTL_PIN_FUNC_D1,
TTL_PIN_FUNC_D2,
TTL_PIN_FUNC_D3,
TTL_PIN_FUNC_D4,
TTL_PIN_FUNC_D5,
TTL_PIN_FUNC_D6,
TTL_PIN_FUNC_D7,
TTL_PIN_FUNC_D8,
TTL_PIN_FUNC_D9,
TTL_PIN_FUNC_D10,
TTL_PIN_FUNC_D11,
TTL_PIN_FUNC_D12,
TTL_PIN_FUNC_D13,
TTL_PIN_FUNC_D14,
TTL_PIN_FUNC_D15,
TTL_PIN_FUNC_NUM,
};
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.27. ttl_src_e¶
【说明】
TTL/BT接口输入来源.
【定义】
enum ttl_src_e {
TTL_VI_SRC_VI0 = 0,
TTL_VI_SRC_VI1,
TTL_VI_SRC_VI2, /* BT demux */
TTL_VI_SRC_NUM
};
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
参考表1-1.
2.5.28. bt_demux_mode_e¶
【说明】
BT解多任务模式的信道数量。
【定义】
enum bt_demux_mode_e {
BT_DEMUX_DISABLE = 0,
BT_DEMUX_2,
BT_DEMUX_3,
BT_DEMUX_4,
};
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.29. bt_demux_sync_s¶
【说明】
BT解多任务模式的同步码设定。
【定义】
struct bt_demux_sync_s {
unsigned char sav_vld;
unsigned char sav_blk;
unsigned char eav_vld;
unsigned char eav_blk;
};
【成员】
成员 |
描述 |
|---|---|
sav_vld |
有效数据区间的SAV |
sav_blk |
空白区间的SAV |
eav_vld |
有效数据区间的EAV |
eav_blk |
空白区间的EAV |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.30. bt_demux_attr_s¶
【说明】
BT解多任务模式的属性设定。
【定义】
struct bt_demux_attr_s {
signed char func[TTL_PIN_FUNC_NUM];
unsigned short v_fp;
unsigned short h_fp;
unsigned short v_bp;
unsigned short h_bp;
enum bt_demux_mode_e mode;
unsigned char sync_code_part_A[3]; /* sync code 0~2 */
struct bt_demux_sync_s sync_code_part_B[BT_DEMUX_NUM]; /* sync code 3 */
char yc_exchg;
};
【成员】
成员 |
描述 |
|---|---|
func |
BT接口对应输入源TTL_VI_SRC_VI2的lane number. Index为BT逻辑功能, value请参考表1-1. 例如, func[TTL_PIN_FUNC_D0] = 5, 代表BT讯号的D0接到VI2_D[5], 即pad name VIVO_D5。 |
v_fp |
垂直方向的front porch |
h_fp |
水平方向的front porch |
v_bp |
垂直方向的back porch |
h_bp |
水平方向的back porch |
mode |
BT解多任务模式的信道数量 |
sync_code_part_A |
BT解多任务模式的0~2同步码 |
sync_code_part_B |
BT解多任务模式的同步码3 |
yc_exchg |
BIT0~BIT3分别代表CH0~CH3的Y Cb/Cr bytes顺序互换. 1 为互换, 0 为不互换. |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.31. ttl_dev_attr_s¶
【说明】
TTL/BT接口的属性设定。
【定义】
struct ttl_dev_attr_s {
enum ttl_src_e vi;
signed char func[TTL_PIN_FUNC_NUM];
unsigned short v_bp;
unsigned short h_bp;
};
【成员】
成员 |
描述 |
|---|---|
vi |
TTL/BT接口的输入来源, 允许值为TTL_VI_SRC_VI0或TTL_VI_SRC_VI1 |
func |
BT接口对应输入源的lane number. Index为BT逻辑功能, value请参考表1-1. 例如, vi = TTL_VI_SRC_VI1时, func[TTL_PIN_FUNC_D0] = 5, 代表BT讯号的D0接到VI1_D[5], 即pad name VIVO_D5. |
v_bp |
垂直方向的back porch |
h_bp |
水平方向的back porch |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.32. combo_dev_attr_s¶
【说明】
combo 设备属性,由于MIPI Rx能够对接CSI-2,sub-LVDS,HiSPi等时序,所以将MIPI Rx称为combo设备。
【定义】
struct combo_dev_attr_s {
enum input_mode_e input_mode;
enum rx_mac_clk_e mac_clk;
struct mclk_pll_s mclk;
union {
struct mipi_dev_attr_s mipi_attr;
struct lvds_dev_attr_s lvds_attr;
struct ttl_dev_attr_s ttl_attr;
struct bt_demux_attr_s bt_demux_attr;
};
unsigned int devno;
struct img_size_s img_size;
struct manaul_wdr_attr_s wdr_manu;
};
【成员】
成员 |
描述 |
|---|---|
input_mode |
输入接口类型 |
mac_clk |
MIPI RX MAC时钟设定 |
mclk |
MIPI RX输出的Sensor参考时钟设定 |
mipi_attr |
如果input_mode配置为INPUT_MODE_MIPI, 则必须配置mipi_attr |
lvds_attr |
如果input_mode配置为INPUT_MODE_SUBLVDS/INPUT_MODE_HISPI, 则必须配置lvds_attr |
devno |
MIPI-Rx设备号 |
img_size |
输入帧大小 |
wdr_manu |
手动WDR属性 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.33. crop_top_s¶
【说明】
舍弃开头的行资料。
【定义】
struct crop_top_s {
unsigned int devno;
unsigned int crop_top;
unsigned int update;
};
【成员】
成员 |
描述 |
|---|---|
devno |
MIPI-Rx设备号 |
crop_top |
开头要拾弃的行数 |
update |
是否强制更新设定。 若否, 设定会等下一张的同步讯号来才更新。 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.34. manual_wdr_s¶
【说明】
手动WDR模式设定。
【定义】
struct manual_wdr_s {
unsigned int devno;
struct manaul_wdr_attr_s attr;
};
【成员】
成员 |
描述 |
|---|---|
devno |
MIPI-Rx设备号 |
attr |
手动WDR属性 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.35. vsync_gen_s¶
【说明】
手动WDR模式设定。
【定义】
struct vsync_gen_s {
unsigned int devno;
unsigned int distance_fp;
};
【成员】
成员 |
描述 |
|---|---|
devno |
MIPI-Rx设备号 |
distance_fp |
当input_mode为INPUT_MODE_SUBLVDS时,产生垂直同步信号的时间点。 |
【处理器差异】
无。
【注意事项】
Sub-LVDS不自带垂直同步信号,所以MIPI-Rx须自行生成送给ISP。 distance_fp 可调整垂直同步时间点以达到加大front porch的作用。
【相关数据类型及接口】
无
2.5.36. LANE_MAX_NUM¶
【说明】
一个MIPI Tx设备支持的最大Lane数。
【定义】
#define MIPI_LANE_NUM 4
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.37. output_mode_e¶
【说明】
MIPI Tx输出模式。
【定义】
enum output_mode_e
{
OUTPUT_MODE_CSI = 0x0, /* csi mode */ OUTPUT_MODE_DSI_VIDEO = 0x1, /* dsi video mode */
OUTPUT_MODE_DSI_CMD = 0x2, /* dsi command mode */
OUTPUT_MODE_BUTT
} output_mode_t;
【处理器差异】
无
【注意事项】
无
【相关数据类型及接口】
无
2.5.38. video_mode_e¶
【说明】
MIPI Tx视频模式。
【定义】
enum video_mode_e {
BURST_MODE = 0x0,
NON_BURST_MODE_SYNC_PULSES = 0x1,
NON_BURST_MODE_SYNC_EVENTS = 0x2,
};
【处理器差异】
无
【注意事项】
无
【相关数据类型及接口】
无
2.5.39. output_format_e¶
【说明】
LVDS 在WDR模式的同步方式。
【定义】
enum output_format_e {
OUT_FORMAT_RGB_16_BIT = 0x0,
OUT_FORMAT_RGB_18_BIT = 0x1,
OUT_FORMAT_RGB_24_BIT = 0x2,
OUT_FORMAT_RGB_30_BIT = 0x3,
OUT_FORMAT_YUV420_8_BIT_NORMAL = 0x4,
OUT_FORMAT_YUV420_8_BIT_LEGACY = 0x5,
OUT_FORMAT_YUV422_8_BIT = 0x6,
OUT_FORMAT_BUTT
};
【处理器差异】
处理器差异 |
是否支持 |
|---|---|
CV181x |
不支持YUV420 |
CV180x |
不支持YUV420 |
【注意事项】
无
【相关数据类型及接口】
无
2.5.40. sync_info_s¶
【说明】
MIPI Tx设备同步信息。
【定义】
struct sync_info_s {
unsigned short vid_hsa_pixels;
unsigned short vid_hbp_pixels;
unsigned short vid_hfp_pixels;
unsigned short vid_hline_pixels;
unsigned short vid_vsa_lines;
unsigned short vid_vbp_lines;
unsigned short vid_vfp_lines;
unsigned short vid_active_lines;
unsigned short edpi_cmd_size;
bool vid_vsa_pos_polarity;
bool vid_hsa_pos_polarity;
};
【成员】
成员 |
描述 |
|---|---|
vid_hsa_pixels |
Horizontal sync-pluse像素个数 |
vid_hbp_pixels |
Horizontal back-porch像素个数 |
vid_hfp_pixels |
Horizontal front-porch像素个数 |
vid_hline_pixels |
Horizontal image active像素个数 |
vid_vsa_lines |
Vertical sync-pluse行数 |
vid_hbp_pixels |
Vertical back-porch行数 |
vid_hbp_pixels |
Vertical front-porch行数 |
vid_active_pixels |
Vertical image active行数 |
edpi_cmd_size |
写内存命令字节数。video mode时该值无效,command mode时该值设为hact。 |
vid_vsa_pos_polarity; |
Horizontal sync-pluse polarity |
vid_hsa_pos_polarity; |
Vertical sync-pluse polarity |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
无
2.5.41. combo_dev_cfg_s¶
【说明】
MIPI Tx设备属性。
【定义】
struct combo_dev_cfg_s {
unsigned int devno;
enum mipi_tx_lane_id lane_id[LANE_MAX_NUM];
enum output_mode_e output_mode;
enum video_mode_e video_mode;
enum output_format_e output_format;
struct sync_info_s sync_info;
unsigned int phy_data_rate;
unsigned int pixel_clk;
bool lane_pn_swap[LANE_MAX_NUM];
};
【成员】
成员 |
描述 |
|---|---|
devno |
devno |
lane_id |
发送端(vo)和接收端(MIPI Tx) Lane的对应关系;未使用的Lane设置为-1。 |
output_mode |
MIPI Tx输出模式。 |
video_mode |
MIPI Tx视频模式。 |
output_format |
MIPI Tx输出格式。 |
sync_info |
MIPI Tx设备的同步信息。 |
phy_data_rate |
MIPI Tx输出速率,MIPI Tx高速模式每个信道(lane)的速率范围的描述。 |
pixel_clk |
像素时钟。单位为KHz |
lane_pn_swap |
Lane设置上是否P/N要互换 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
2.5.42. cmd_info_s¶
【说明】
给MIPI Tx设备初始化信息。
【定义】
struct cmd_info_s {
unsigned int devno;
unsigned short data_type;
unsigned short cmd_size;
#ifdef __arm__
unsigned char *cmd;
unsigned int padding;
#else
unsigned char *cmd;
#endif
};
【成员】
成员 |
描述 |
|---|---|
devno |
MIPI Tx设备号 |
data_type |
命令数据类型 |
cmd_size |
命令数据字节数,范围:(0,128)。 |
cmd_data |
命令数据地址指针,需要用户分配。 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
2.5.43. get_cmd_info_s¶
【说明】
从MIPI Tx设备取回信息。
【定义】
struct get_cmd_info_s {
unsigned int devno;
unsigned short data_type;
unsigned short data_param;
unsigned short get_data_size;
#ifdef __arm__
unsigned int padding1;
unsigned char *get_data;
unsigned int padding2;
#else
unsigned int padding1;
unsigned char *get_data;
#endif
};
【成员】
成员 |
描述 |
|---|---|
devno |
MIPI Tx设备号 |
data_type |
命令数据类型 |
data_param |
数据参数,低八比特为第一个参数,高八比特为第二个参数、不用时填0 |
get_data_size |
预期获取的数据字节数,范围:(0,4)。 |
get_data |
获取到的数据存放地址指针,需要用户分配。 |
【处理器差异】
无。
【注意事项】
无
【相关数据类型及接口】
2.5.44. hs_settle_s¶
【说明】
MIPI Tx设备HS mode下的settle信息。
【定义】
struct hs_settle_s {
unsigned char prepare;
unsigned char zero;
unsigned char trail;
};
【成员】
成员 |
描述 |
|---|---|
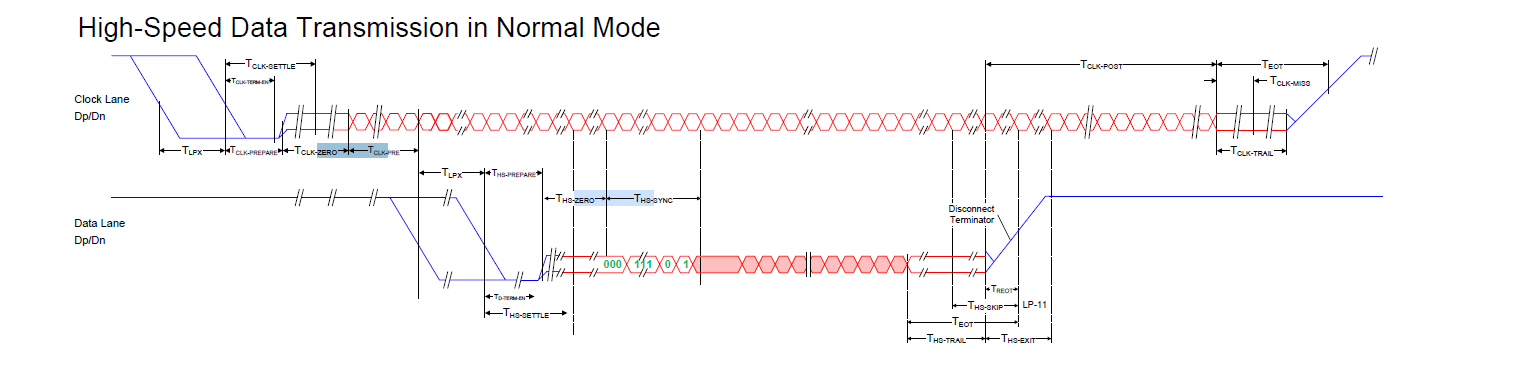
prepare |
为LP->HS后的前置准备T数 |
zero |
在进入HS后,在输出数据前为0的T数 |
trail |
在HS->LP时,要结束HS前,数据结束后额外的T数 |
【处理器差异】
无。
【注意事项】
【相关数据类型及接口】
无
2.6. Proc信息¶
2.6.1. MIPI_RX Proc信息¶
MIPI_Rx在正常工作下proc信息中的各种错误中断计数应为0。 若否,请检查MIPI_Rx相关属性是否配置正确。
【调试信息】
Module: [MIPI_RX], Build Time[#1 SMP PREEMPT Thu Apr 29 11:18:57 CST 2021]
------------Combo DEV ATTR--------------
Devno WorkMode DataType WDRMode LinkId PN Swap SyncMode DataEndian SyncCodeEndian
0 MIPI RAW12 NONE 2, 3, 1, 4, 0 1, 1, 1, 1, 1 N/A N/A N/A
------------MIPI info-------------------
Devno EccErr CrcErr HdrErr WcErr fifofull decode
0 0 0 0 2 0 raw12
Physical: D0 D1 D2 D3 D4 D5
0 0 0 0 0 0
Digital: D0 D1 D2 D3 CK_HS CK_ULPS CK_STOP CK_ERR Deskew
hs_idle hs_idle hs_idle hs_idle 1 0 0 0 idle
【调试信息分析】
MIPI Rx通过PHY Wrapper接收Sensor的MIPI-CSI/SubLVDS/HiSPi/TTL讯号, 由MAC内对应的接口进行同步头检测与对齐。
MAC将各Lane的数据合并成Pixel数据, 并将数据发送给后级的ISP。
PHY Wrapper由sensor的pixel clock提供时钟。 MAC内的时钟与后级的ISP相同。
若要操作数据的Crop, 可由后级的ISP来调试。
图 1‑5数据示例图
【参数说明】
参数 |
描述 |
|
|---|---|---|
MIPI DEV ATTR |
Devno |
MIPI设备号 |
WorkMode |
MIPI设备工作模式: MIPI/ SUBLVDS/HISPI/CMOS等模式 |
|
DataType |
RAW8/RAW10/RAW12等类型 |
|
WDRMode |
|
|
LaneId |
Lane id |
|
PN Swap |
PN 讯号交换 |
|
LVDS DEV ATTR |
Devno |
MIPI设备号 |
WorkMode |
MIPI设备工作模式: MIPI/ SUBLVDS/HISPI/CMOS等模式 |
|
DataType |
RAW8/RAW10/RAW12等类型 |
|
WDRMode |
|
|
LaneId |
Lane id |
|
PN Swap |
PN 讯号交换 |
|
SyncMode |
|
|
DataEndian |
Data的比特位大小端模式 |
|
SyncCodeEndian |
同步码的比特位大小端模式 |
|
MIPI Info (仅MIPI模式可见) |
Devno |
MIPI设备号 |
EccErr |
ECC错误的中断计数 |
|
CrcErr |
CRC错误的中断计数 |
|
HdrErr |
HDR Flag错误的中断计数 |
|
WcErr |
Word Count错误的中断计数 |
|
fifofull |
Fifofull 的中断计数 |
|
Physical: D0 |
MIPIRX_PAD0 收到的资料 |
|
Physical: D1 |
MIPIRX_PAD1 收到的资料 |
|
Physical: D2 |
MIPIRX_PAD2 收到的资料 |
|
Physical: D3 |
MIPIRX_PAD3 收到的资料 |
|
Physical: D4 |
MIPIRX_PAD4 收到的资料 |
|
Physical: D5 |
MIPIRX_PAD5 收到的资料 |
|
Digital: D0 |
Sensor data lane 0 state |
|
Digital: D1 |
Sensor data lane 1 state |
|
Digital: D2 |
Sensor data lane 2 state |
|
Digital: D3 |
Sensor data lane 3 state |
|
CK_HS/CK_ULPS/CK_STOP/CK_ERR |
Sensor clock lane state |
|
Deskew |
Deskew 结果 |
|
2.7. FAQ¶
2.7.1. 1.6.1. Land id如何配置¶
Land id的配置对应mipi_dev_attr_s中的short lane_id[MIPI_LANE_NUM+1]或者lvds_dev_attr_s中 的short lane_id[MIPI_LANE_NUM+1],其中lane_id数组的索引号表示的是Sensor的Lane ID,索引号 0表示sensor clock,索引号1表示sensor lane 0。 land_id数组的值表示的是MIPI-Rx的Lane ID, 0表示MIPIRX1_PAD0,1表示MIPIRX1_PAD1。未使用的lane将其对应的lane_id配置为-1。
下面举例说明,例如MIPI与SENSOR的引脚硬件连接如下表所示。
SENSOR管脚 |
MIPI Lane管脚 |
|---|---|
Clock Lane (index = 0) |
MIPIRX1_PAD0 (value = 0) |
Lane 0 (index = 1) |
MIPIRX1_PAD1 (value = 1) |
Lane 1 (index = 2) |
MIPIRX1_PAD2 (value = 2) |
Lane 2 (index = 3) |
MIPIRX1_PAD3 (value = 3) |
Lane 3 (index = 4) |
MIPIRX1_PAD4 (value = 4) |
MIPI的最大Lane数加上Clock为5,所以lane_id配置如下:
//索引sensor_clk, sensor_lane0, sensor_lane1, sensor_lane2, sensor_lane3
// ↓ ↓ ↓ ↓ ↓
land_id={MIPIRX1_PAD0 MIPIRX1_PAD1 MIPIRX1_PAD2 MIPIRX1_PAD3 MIPIRX1_PAD4 }
2.7.2. MIPI频率说明¶
使用以下公式计算MIPI每Lane最高频率与VI MAC的工作频率:
MAC_Freq * pixel_width = lane_num * MIPI_Freq * 2。 其中MAC_Freq为VI MAC的工作频率,pixel_width为像素位宽,lane_num为MIPI lane个数,MIPI_Freq为每条lane的工作频率。 若MAC clock为400M,pixel_width = 12,lane_num = 4, 可支持最快MIPI_Freq = 400 * 12 / ( 4 * 2) = 600MHz。
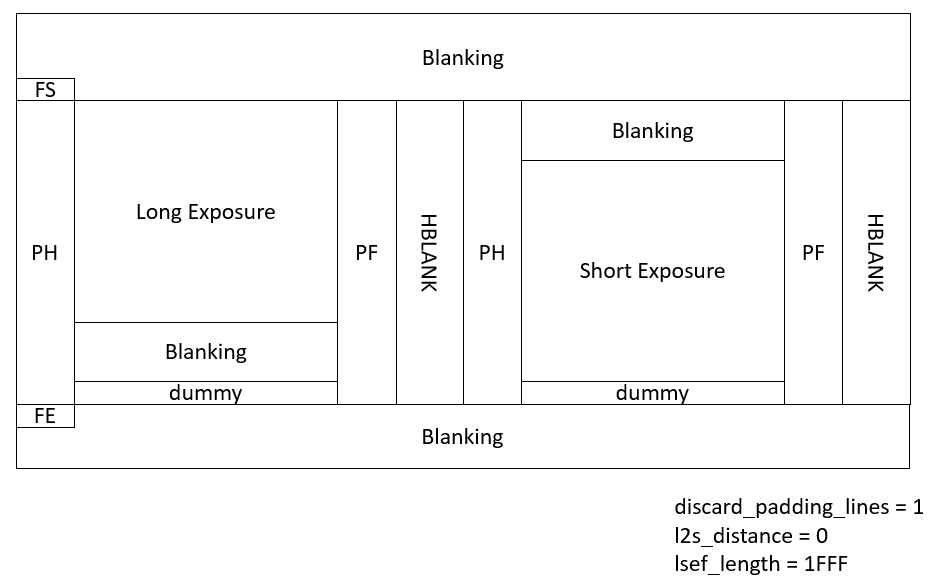
2.7.3. Manual WDR模式使用说明¶
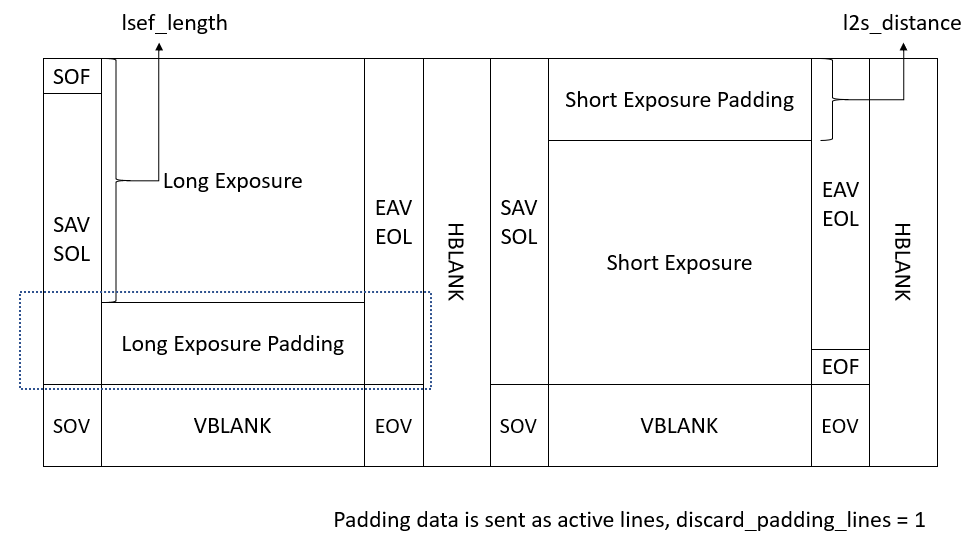
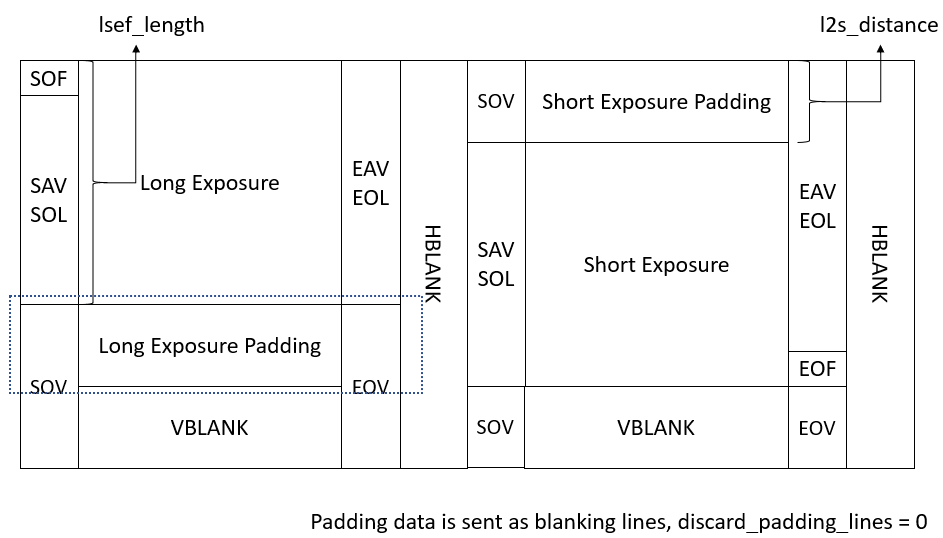
当手动WDR模式打开后,MIPI-Rx会把收下来的数据以行为单位,遵遁以下规则分配给长曝帧与短曝帧。
l2s_distance: 从第一行到第l2s_distance行都是长曝数据,第l2s_distance+1行开始长曝与短曝交错分配。
lsef_length: 第lsef_length+1行开始都是短曝帧数据。 直到下个垂直同步信号为止。
当discard_padding_lines=1时,1到l2s_distance行分配方式为{长-ignore-长-ignore …},第l2s_distance+1到lsef_length行分配方式为{长-短-长-短 …}。第lsef_length+1行到下个垂直同步信号分配方式为{短-ignore-短-ignore …}。
当discard_padding_lines=0时,1到l2s_distance行分配方式为{长-长-长 …},第l2s_distance+1到lsef_length行分配方式为{长-短-长-短 …}。第lsef_length+1行到下个垂直同步信号分配方式为{短-短-短 …}。
MIPI-Rx必须确保发送给ISP的长曝帧与短曝帧行数是一致的。
调整sensor短曝长度,有可能l2s_distance需要一起调整。
有些sensor可能会在送完短曝有效数据后带dummy行。 这会造成长曝与短曝的行数不一致。 可将l2s_distance设成0,lsef_length设成最大值0x1FFF,discard_padding_lines为1即收下两张带有效与dummy数据的长短曝,再用ISP crop有效位置即可。