1. TDL_SDK 简介¶
TDL_SDK(Turnkey Deep Learning SDK) 是一个基于算能芯片产品的开箱即用深度学习算法SDK, 致力于为用户提供跨平台(端、边)、简单易用、资源节约、性能高效的算法库及应用。 它基于模块化设计,同类型功能模块抽象出基类,遵循高内聚低耦合,仅对外暴露基类,不暴露具体实现;同时具有可扩展性和可维护性。
1.1. TDL_SDK总体结构¶
tdl_sdk/
├── CMakeLists.txt # 根 CMake 构建脚本
├── build_tdl_sdk.sh # SDK 构建脚本
├── clang-format.sh # 代码格式化脚本
├── clang-tidy.sh # 代码静态分析脚本
├── .clang-format # Clang 格式化配置
├── .clang-tidy # Clang 静态分析配置
├── cmake/ # CMake 相关模块
│ ├── opencv.cmake # OpenCV 依赖查找
│ ├── middleware.cmake # 多媒体件依赖查找
│ ├── mlir.cmake # MLIR 依赖查找
│ └── thirdparty.cmake # 第三方库依赖查找
├── configs/ # 模型参数配置文件
├── docs/ # 文档目录
│ ├── README.md # 文档说明
│ ├── LICENSE # 许可证文件
│ ├── getting_started/ # 入门指南
│ ├── developer_guide/ # 开发者文档
│ ├── api_reference/ # API 参考手册
│ └── images/ # 文档图片资源
├── include/ # 对外导出的头文件
│ ├── framework/ # 框架层 API
│ ├── components/ # 组件 API
│ ├── nn/ # 神经网络模型 API
│ ├── app/ # app类 API
│ ├── pipeline/ # pipeline类 API
│ └── c_apis/ # C 语言 API
├── src/ # 内部实现
│ ├── framework/ # 框架层实现
│ │ ├── common/ # 公共工具实现
│ │ ├── image/ # 图像处理实现
│ │ ├── memory/ # 内存管理实现
│ │ ├── model/ # 模型实现
│ │ ├── net/ # 神经网络实现
│ │ ├── preprocess/ # 预处理实现
│ │ ├── tensor/ # 张量处理实现
│ │ └── utils/ # 通用工具实现
│ ├── components/ # 组件实现
│ │ ├── cv/ # 视觉相关的检测类实现
│ │ ├── encoder/ # 编码相关功能实现
│ │ ├── ive/ # ive图像处理功能实现
│ │ ├── llm/ # 大模型类实现
│ │ ├── matcher/ # 特征匹配功能的实现
│ │ ├── network/ # 网络组件的实现
│ │ ├── nn/ # 神经网络模型实现
│ │ ├── tracker/ # 目标跟踪实现
│ │ ├── snapshot/ # 抓拍实现
│ │ └── video_decoder/ # 相机和解码实现
│ ├── c_apis/ # C API 封装
│ └── python/ # Python 绑定
├── sample/ # 示例代码
│ ├── cpp/ # C++ 示例
│ ├── c/ # C 示例
│ └── python/ # Python 示例
├── evaluation/ # 性能评估
├── tool/ # 工具集
├── toolchain/ # 工具链
├── scripts/ # 脚本
└── README.md # 项目说明
1.2. framework 模块¶
为实现跨平台模型推理的统一框架,基于此框架部署的模型,可以在多种硬件平台运行。该框架包括的模块如下:
common
公共定义和工具,包括错误码、日志、配置等
提供跨模块使用的通用功能
image
图像类的抽象封装,支持多种图像格式和数据类型
提供图像读取、转换、处理等基础功能
支持 OpenCV、VPSS 等多种后端实现
memory
内存池类的抽象封装,用于高效内存管理
支持多种内存类型(系统内存、设备内存等)
提供内存分配、释放和复用机制
model
模型类的抽象封装,用于加载和运行神经网络模型
支持多种模型格式(ONNX、TensorFlow、PyTorch等)
提供模型推理和优化功能
net
神经网络类接口的封装,用于推理结果
preprocess
预处理类的抽象封装,用于图像预处理
支持多种预处理操作(缩放、裁剪、归一化等)
提供 OpenCV、VPSS 等多种后端实现
tensor
张量类的抽象封装,用于表示神经网络模型的输入输出
支持多种数据类型和内存布局
提供张量操作和转换功能
utils
工具类接口的封装,包括有定时计数,图像对齐和计算等工具
1.3. components 组件¶
具体算法相关的组件,包括:
cv
视觉相关的检测类实现
已支持入侵检测,运动检测和遮挡检测
encoder
编码类接口的实现
支持rtsp出流,实时查看算法效果
ive
ive图像处理功能实现
使用tpu进行计算
llm
大模型实现
支持qwen和qwen2-VL
matcher
特征匹配功能的实现
支持使用cpu或tpu进行计算
network
网络功能的实现
nn
各种神经网络模型实现,如目标检测、人脸检测、车牌识别等
提供模型加载、推理和结果解析功能
snapshot
抓拍功能的实现
track
目标跟踪算法实现
支持多种跟踪算法(KCF、SORT、DeepSORT等)
video_decoder
相机和解码功能实现
支持多种相机接口和解码格式
1.4. 其他¶
c_apis:C 语言 API 封装,提供跨语言调用支持
提供与 C++ API 功能对应的 C 接口
支持 C 语言应用程序集成
提供内存管理和错误处理机制
sample:示例代码,展示 SDK 的使用方法
C++ 语言示例,展示框架层和组件层的使用方法
C 语言示例,展示 C API 的使用方法
Python 语言示例,展示 Python 绑定的使用方法
evaluation:性能评估,用于评估 SDK 的性能
提供性能测试和基准测试功能
支持多种性能指标(吞吐量、延迟、内存使用等)
提供性能分析和优化建议
tool:工具集,提供开发和调试支持
模型转换工具
性能分析工具
调试和日志工具
toolchain:工具链,提供编译和构建支持
交叉编译工具链
依赖库和头文件
构建脚本和配置
scripts:脚本,提供自动化支持
构建脚本
测试脚本
部署脚本
2. TDL_SDK 环境搭建¶
2.1. 代码拉取及整体编译¶
TDL_SDK 除了cmodel模式外,都需要依赖sophpi sdk才能正常运行,sophpi sdk的获取方式和编译方式在如下网址中:
https://github.com/sophgo/sophpi
请先按照网址中的教程拉取代码,TDL_SDK也将随着sophpi sdk被下载下来。在进行编译之前,需执行export TPU_REL=1, 这样才能编译到TDL_SDK以及其他相关库,具体的编译流程如下:
export TPU_REL=1
source build/envsetup_soc.sh
defconfig sg2002_wevb_riscv64_sd //这里需要选择对应的板端型号
clean_all
build_all //编译所有组件,包括TDL_SDK
第一次编译时,一定要完整执行如上的步骤。
2.2. TDL_SDK编译方式¶
进行完上述步骤后,就可以仅编译TDL_SDK,提供了两种编译方式
1.使用makefile定义的伪目标编译
build_tdl_sdk
如果编译失败先使用clean_tdl_sdk将旧的编译产物清除掉再重新编译。
2.使用build_tdl_sdk.sh脚本进行编译
cd tdl_sdk
./build_tdl_sdk.sh all
如果编译失败先使用./build_tdl_sdk.sh clean将旧的编译产物清除掉再重新编译。
build_tdl_sdk.sh提供了一些编译配置供选择,具体如下:
./build_tdl_sdk.sh sample //仅编译sample,在仅改动sample文件夹下内容时使用,节省编译时间
./build_tdl_sdk.sh static //编译的sample为静态文件,注意static这个参数仅影响sample,TDL_SDK依旧会编译出静态库和动态库
./build_tdl_sdk.sh debug //编译时引入debug信息,仅调试时使用
2.3. cmodel模式¶
TDL_SDK支持cmodel模式,可以支持在PC端模拟芯片的运算逻辑,使得sample能够直接在PC端模拟芯片端运行测试。cmodel使用方式如下:
1.下载第三方依赖库
cd tdl_sdk
./scripts/download_thirdparty.sh
2.获取编译依赖
./scripts/extract_cvitek_tpu_sdk.sh
3.编译TDL_SDK
./build_tdl_sdk.sh CMODEL_CVITEK
如果编译失败先使用./build_tdl_sdk.sh clean将旧的编译产物清除掉再重新编译。
3. TDL_SDK 模型列表¶
3.1. 检测类模型列表¶
模型名称 |
注释 |
TDL_MODEL_MBV2_DET_PERSON |
人体检测模型(0:person) |
TDL_MODEL_YOLOV8N_DET_HAND |
手部检测模型(0:hand) |
TDL_MODEL_YOLOV8N_DET_PET _PERSON |
宠物与人检测模型 (0:猫, 1:狗, 2:人) |
TDL_MODEL_YOLOV8N_DET_PERSON _VEHICLE |
人与车辆检测模型 (0:车, 1:公交, 2:卡车, 3:骑摩托车者, 4:人, 5:自行车, 6:摩托车) |
TDL_MODEL_YOLOV8N_DET_HAND _FACE_PERSON |
手、脸与人检测模型 (0:手, 1:脸, 2:人) |
TDL_MODEL_YOLOV8N_DET_HEAD _PERSON |
人头检测模型 (0:人, 1:头) |
TDL_MODEL_YOLOV8N_DET_HEAD _HARDHAT |
头部与安全帽检测模型 (0:头, 1:安全帽) |
TDL_MODEL_YOLOV8N_DET_FIRE _SMOKE |
火与烟检测模型 (0:火, 1:烟) |
TDL_MODEL_YOLOV8N_DET_FIRE |
火检测模型 (0:火) |
TDL_MODEL_YOLOV8N_DET_HEAD _SHOULDER |
头肩检测模型 (0:头肩) |
TDL_MODEL_YOLOV8N_DET_LICENSE _PLATE |
车牌检测模型 (0:车牌) |
TDL_MODEL_YOLOV8N_DET_TRAFFIC _LIGHT |
交通信号灯检测模型 (0:红, 1:黄, 2:绿, 3:关闭, 4:等待) |
TDL_MODEL_YOLOV8N_DET_MONITOR _PERSON |
人体检测模型(0:person) |
TDL_MODEL_YOLOV5_DET_COCO80 |
YOLOV5 COCO80检测模型 |
TDL_MODEL_YOLOV6_DET_COCO80 |
YOLOV6 COCO80检测模型 |
TDL_MODEL_YOLOV7_DET_COCO80 |
YOLOV7 COCO80检测模型 |
TDL_MODEL_YOLOV8_DET_COCO80 |
YOLOV8 COCO80检测模型 |
TDL_MODEL_YOLOV10_DET_COCO80 |
YOLOV10 COCO80检测模型 |
TDL_MODEL_PPYOLOE_DET_COCO80 |
PPYOLOE COCO80检测模型 |
TDL_MODEL_YOLOX_DET_COCO80 |
YOLOX COCO80检测模型 |
3.2. 人脸识别类模型列表¶
模型名称 |
注释 |
TDL_MODEL_SCRFD_DET_FACE |
SCRFD 人脸检测模型 (0:人脸 + 关键点) |
TDL_MODEL_RETINA_DET_FACE |
RETINA 人脸检测模型 |
TDL_MODEL_RETINA_DET_FACE_IR |
RETINA 红外人脸检测模型 |
3.3. 人脸属性和特征点类模型列表¶
模型名称 |
注释 |
TDL_MODEL_KEYPOINT_FACE_V2 |
5个关键点 + 模糊评分的人脸检测模型 |
TDL_MODEL_CLS_ATTRIBUTE_GENDER _AGE_GLASS |
人脸属性分类模型 (年龄, 性别, 眼镜) |
TDL_MODEL_CLS_ATTRIBUTE_GENDER _AGE_GLASS_MASK |
人脸属性分类模型 (年龄, 性别, 眼镜, 口罩) |
TDL_MODEL_CLS_ATTRIBUTE_GENDER _AGE_GLASS_EMOTION |
人脸属性分类模型 (年龄, 性别, 眼镜, 情绪) |
3.4. 图像分类模型列表¶
模型名称 |
注释 |
TDL_MODEL_CLS_MASK |
口罩检测模型 (0:戴口罩, 1:不戴口罩) |
TDL_MODEL_CLS_RGBLIVENESS |
活体检测模型 (0:活体, 1:伪造) |
TDL_MODEL_CLS_ISP_SCENE |
ISP场景分类模型(“0:雪, 1:雾, 2:逆光, 3:草, 4:普通场景”) |
TDL_MODEL_CLS_HAND_GESTURE |
手势分类模型 (0:拳头, 1:五指, 2:无, 3:二) |
TDL_MODEL_CLS_KEYPOINT_HAND _GESTURE |
手势关键点分类模型 (0:拳头, 1:五指, 2:四指, 3:无, 4:好, 5:一, 6:三, 7:三2, 8:二) |
3.5. 声音分类模型列表¶
模型名称 |
注释 |
TDL_MODEL_CLS_SOUND_BABAY_CRY |
婴儿哭声分类模型 (0:背景, 1:哭声) |
TDL_MODEL_CLS_SOUND_COMMAND _NIHAOSHIYUN |
命令声音分类模型 (0:背景, 1:nihaoshiyun) |
TDL_MODEL_CLS_SOUND_COMMAND _NIHAOSUANNENG |
命令声音分类模型 (0:背景, 1:nihaosuanneng) |
TDL_MODEL_CLS_SOUND_COMMAND _XIAOAIXIAOAI |
命令声音分类模型 (0:背景, 1:xiaoaixiaoai) |
TDL_MODEL_CLS_SOUND_COMMAND |
命令声音分类模型 (0:背景, 1:命令1, 2:命令2) |
3.6. 关键点识别类模型列表¶
模型名称 |
注释 |
TDL_MODEL_KEYPOINT_LICENSE PLATE |
车牌关键点检测模型 |
TDL_MODEL_KEYPOINT_HAND |
手部关键点检测模型 |
TDL_MODEL_KEYPOINT _YOLOV8POSE_PERSON17 |
人体17个关键点检测模型 |
TDL_MODEL_KEYPOINT_SIMCC _PERSON17 |
SIMCC 17个关键点检测模型 |
3.7. 线识别类模型列表¶
模型名称 |
注释 |
TDL_MODEL_LSTR_DET_LANE |
车道检测模型 |
3.8. 车牌识别类模型列表¶
模型名称 |
注释 |
TDL_MODEL_RECOGNITION_LICENSE _PLATE |
车牌识别模型 |
3.9. 分割类模型列表¶
TDL_MODEL_YOLOV8_SEG_COCO80 |
YOLOV8 COCO80分割模型 |
TDL_MODEL_SEG_PERSON_FACE_VEHICLE |
人、脸与车辆分割模型 (0:背景, 1:人, 2:脸, 3:车辆, 4:车牌) |
TDL_MODEL_SEG_MOTION |
动作分割模型 (0:静态, 2:过渡, 3:运动) |
3.10. 特征值提取类模型列表¶
TDL_MODEL_FEATURE_IMG |
图像特征提取模型 |
TDL_MODEL_IMG_FEATURE_CLIP |
CLIP图像嵌入模型 |
TDL_MODEL_TEXT_FEATURE_CLIP |
CLIP文本嵌入模型 |
TDL_MODEL_FEATURE_CVIFACE |
Cviface 256维特征提取模型 |
TDL_MODEL_FEATURE_BMFACE_R34 |
ResNet34 512维特征提取模型 |
TDL_MODEL_FEATURE_BMFACE_R50 |
ResNet50 512维特征提取模型 |
4. TDL_SDK 结构体参考¶
4.1. TDLDataTypeE¶
【说明】
数据类型枚举类
【定义】
typedef enum {
TDL_TYPE_INT8 = 0, /**< Equals to int8_t. */
TDL_TYPE_UINT8, /**< Equals to uint8_t. */
TDL_TYPE_INT16, /**< Equals to int16_t. */
TDL_TYPE_UINT16, /**< Equals to uint16_t. */
TDL_TYPE_INT32, /**< Equals to int32_t. */
TDL_TYPE_UINT32, /**< Equals to uint32_t. */
TDL_TYPE_BF16, /**< Equals to bf17. */
TDL_TYPE_FP16, /**< Equals to fp16. */
TDL_TYPE_FP32, /**< Equals to fp32. */
TDL_TYPE_UNKOWN /**< Equals to unkown. */
} TDLDataTypeE;
【成员】
数据类型枚举类 |
注释 |
TDL_TYPE_INT8 |
有符号8位整数 |
TDL_TYPE_UINT8 |
无符号8位整数 |
TDL_TYPE_INT16 |
有符号16位整数 |
TDL_TYPE_UINT16 |
无符号16位整数 |
TDL_TYPE_INT32 |
有符号32位整数 |
TDL_TYPE_UINT32 |
无符号32位整数 |
TDL_TYPE_BF16 |
16位浮点数 (1 位符号, 8 位指数和 7 位尾数) |
TDL_TYPE_FP16 |
16位浮点数 (1 位符号, 5 位指数和 10 位尾数) |
FTDL_TYPE_FP32 |
32位浮点数 |
4.2. TDLBox¶
【说明】
box的坐标数据
【定义】
typedef struct {
float x1;
float y1;
float x2;
float y2;
} TDLBox;
【成员】
数据类型枚举类 |
注释 |
x1 |
box左上角x的坐标 |
y1 |
box左上角y的坐标 |
x2 |
box右下角x的坐标 |
y2 |
box右下角y的坐标 |
4.3. TDLFeature¶
【说明】
特征值数据
【定义】
typedef struct {
int8_t *ptr;
uint32_t size;
TDLDataTypeE type;
} TDLFeature;
【成员】
数据类型枚举类 |
注释 |
ptr |
特征值数据 |
size |
数据大小 |
type |
数据类型 |
4.4. TDLPoints¶
【说明】
坐标队列数据
【定义】
typedef struct {
float *x;
float *y;
uint32_t size;
float score;
} TDLPoints;
【成员】
数据类型枚举类 |
注释 |
x |
坐标队列的x数据 |
y |
坐标队列的y数据 |
size |
坐标队列的大小 |
score |
分数 |
4.5. TDLLandmarkInfo¶
【说明】
特征点信息
【定义】
typedef struct {
float x;
float y;
float score;
} TDLLandmarkInfo;
【成员】
数据类型枚举类 |
注释 |
x |
特征点的x坐标 |
y |
特征点的y坐标 |
score |
分数 |
4.6. TDLObjectInfo¶
【说明】
目标检测信息
【定义】
typedef struct {
char name[128];
TDLBox box;
float score;
int class_id;
uint32_t landmark_size;
TDLLandmarkInfo *landmark_properity;
TDLObjectTypeE obj_type;
} TDLObjectInfo;
【成员】
数据类型枚举类 |
注释 |
name |
目标检测的命名 |
box |
目标检测的框图信息 |
score |
目标检测的分数 |
class_id |
目标检测的类别id |
landmark_size |
目标检测的特征点大小 |
TDLLandmarkInfo |
目标检测的特征点信息 |
obj_type |
目标检测的类型 |
4.7. TDLObject¶
【说明】
目标检测数据
【定义】
typedef struct {
uint32_t size;
uint32_t width;
uint32_t height;
TDLObjectInfo *info;
} TDLObject;
【成员】
数据类型枚举类 |
注释 |
size |
目标检测的个数 |
width |
目标检测图像的宽度 |
height |
目标检测图像的高度 |
info |
目标检测信息 |
4.8. TDLFaceInfo¶
【说明】
人脸信息
【定义】
typedef struct {
char name[128];
float score;
uint64_t track_id;
TDLBox box;
TDLPoints landmarks;
TDLFeature feature;
float gender_score;
float glass_score;
float age;
float liveness_score;
float hardhat_score;
float mask_score;
float recog_score;
float face_quality;
float pose_score;
float blurness;
} TDLFaceInfo;
【成员】
数据类型枚举类 |
注释 |
name |
人脸的姓名 |
score |
人脸的分数 |
track_id |
人脸的追踪id |
box |
人脸的box信息 |
landmarks |
人脸的特征点 |
feature |
人脸的特征值 |
gender_score |
人脸的性别分数 |
glass_score |
人脸是否带眼镜 |
age |
人脸的年龄 |
liveness_score |
人脸的活体分数 |
hardhat_score |
人脸的是否带安全帽分数 |
recog_score |
人脸的识别罩分数 |
face_quality |
人脸的质量分数 |
pose_score |
人脸的姿态分数 |
blurness |
人脸的模糊度 |
4.9. TDLFace¶
【说明】
人脸数据
【定义】
typedef struct {
uint32_t size;
uint32_t width;
uint32_t height;
TDLFaceInfo *info;
} TDLFace;
【成员】
数据类型枚举类 |
注释 |
size |
人脸的个数 |
width |
人脸图像的宽度 |
height |
人脸图像的高度 |
info |
人脸信息 |
4.10. TDLClassInfo¶
【说明】
分类信息
【定义】
typedef struct {
int32_t class_id;
float score;
} TDLClassInfo;
【成员】
数据类型枚举类 |
注释 |
class_id |
分类的类别 |
score |
分类的分数 |
4.11. TDLClass¶
【说明】
分类数据
【定义】
typedef struct {
uint32_t size;
TDLClassInfo *info;
} TDLClass;
【成员】
数据类型枚举类 |
注释 |
size |
分类的个数 |
info |
分类信息 |
4.12. TDLKeypointInfo¶
【说明】
关键点信息
【定义】
typedef struct {
float x;
float y;
float score;
} TDLKeypointInfo;
【成员】
数据类型枚举类 |
注释 |
x |
关键点的x坐标 |
y |
关键点的y坐标 |
score |
关键点的分数 |
4.13. TDLKeypoint¶
【说明】
关键点数据
【定义】
typedef struct {
uint32_t size;
uint32_t width;
uint32_t height;
TDLKeypointInfo *info;
} TDLKeypoint;
【成员】
数据类型枚举类 |
注释 |
size |
关键点的个数 |
width |
图像的宽度 |
height |
图像的高度 |
info |
关键点信息 |
4.14. TDLSegmentation¶
【说明】
语义分割数据
【定义】
typedef struct {
uint32_t width;
uint32_t height;
uint32_t output_width;
uint32_t output_height;
uint8_t *class_id;
uint8_t *class_conf;
} TDLSegmentation;
【成员】
数据类型枚举类 |
注释 |
width |
图像的宽度 |
height |
图像的高度 |
output_width |
输出图像的宽度 |
output_height |
输出图像的高度 |
class_id |
分类的类别 |
class_conf |
分类的坐标信息 |
4.15. TDLInstanceSegInfo¶
【说明】
实例分割信息
【定义】
typedef struct {
uint8_t *mask;
float *mask_point;
uint32_t mask_point_size;
TDLObjectInfo *obj_info;
} TDLInstanceSegInfo;
【成员】
数据类型枚举类 |
注释 |
mask |
实例分割的mask队列 |
mask_point |
实例分割的mask_point队列 |
mask_point_size |
实例分割的point个数 |
obj_info |
实例分割的目标检测信息 |
4.16. TDLInstanceSeg¶
【说明】
实例分割数据
【定义】
typedef struct {
uint32_t size;
uint32_t width;
uint32_t height;
uint32_t mask_width;
uint32_t mask_height;
TDLInstanceSegInfo *info;
} TDLInstanceSeg;
【成员】
数据类型枚举类 |
注释 |
size |
实例分割的个数 |
width |
图像的宽度 |
height |
图像的高度 |
mask_width |
mask的宽度 |
mask_height |
mask的高度 |
info |
实例分割信息 |
4.17. TDLLanePoint¶
【说明】
线检测的坐标点
【定义】
typedef struct {
float x[2];
float y[2];
float score;
} TDLLanePoint;
【成员】
数据类型枚举类 |
注释 |
x |
x坐标队列 |
y |
y坐标队列 |
score |
线检测的分数 |
4.18. TDLLane¶
【说明】
线检测数据
【定义】
typedef struct {
uint32_t size;
uint32_t width;
uint32_t height;
TDLLanePoint *lane;
int lane_state;
} TDLLane;
【成员】
数据类型枚举类 |
注释 |
size |
线检测的个数 |
width |
图像的宽度 |
height |
图像的高度 |
lane |
线检测坐标点 |
lane_state |
线条状态 |
4.19. TDLDepthLogits¶
【说明】
深度估计数据,目前暂未实现对应 C 接口
【定义】
typedef struct {
int w;
int h;
int8_t *int_logits;
} TDLDepthLogits;
【成员】
数据类型枚举类 |
注释 |
w |
图像的宽度 |
h |
图像的高度 |
int_logits |
深度估计信息 |
4.20. TDLTracker¶
【说明】
追踪数据
【定义】
typedef struct {
uint32_t size;
uint64_t id;
TDLBox bbox;
int out_num;
} TDLTracker;
【成员】
数据类型枚举类 |
注释 |
size |
追踪目标的个数 |
id |
追踪目标的id |
bbox |
追踪目标的box |
out_num |
追踪目标的小时次数 |
4.21. TDLOcr¶
【说明】
文本识别数据
【定义】
typedef struct {
uint32_t size;
char* text_info;
} TDLOcr;
【成员】
数据类型枚举类 |
注释 |
size |
文本识别的个数 |
text_info |
文本识别的信息 |
4.22. TDLSnapshotInfo¶
【说明】
抓拍信息
【定义】
typedef struct {
float quality;
uint64_t snapshot_frame_id;
uint64_t track_id;
bool male;
bool glass;
uint8_t age;
uint8_t emotion;
TDLImage object_image;
} TDLSnapshotInfo;
【成员】
数据类型枚举类 |
注释 |
quality |
抓拍的质量 |
snapshot_frame_id |
帧id |
track_id |
追踪id |
male |
性别分数 |
glass |
眼镜分数 |
age |
年龄分数 |
emotion |
情绪状态 |
object_image |
抓拍的image对象 |
4.23. TDLCaptureInfo¶
【说明】
抓拍参数结构体
【定义】
typedef struct {
uint32_t snapshot_size;
uint64_t frame_id;
uint32_t frame_width;
uint32_t frame_height;
TDLFace face_meta;
TDLObject person_meta;
TDLObject pet_meta;
TDLTracker track_meta;
TDLSnapshotInfo *snapshot_info;
TDLFeature *features;
TDLImage image;
} TDLCaptureInfo;
【成员】
数据类型枚举类 |
注释 |
snapshot_size |
抓拍的个数 |
frame_id |
帧id |
frame_width |
帧宽度 |
frame_height |
帧长度 |
face_meta |
人脸数据 |
person_meta |
行人数据 |
pet_meta |
宠物数据 |
track_meta |
追踪数据 |
snapshot_info |
抓拍信息 |
features |
特征值信息 |
image |
用于检测的原始图像 |
4.24. TDLObjectCountingInfo¶
【说明】
客流量统计信息
【定义】
typedef struct {
uint64_t frame_id;
uint32_t frame_width;
uint32_t frame_height;
uint32_t enter_num;
uint32_t miss_num;
int counting_line[4];
TDLObject object_meta;
TDLImage image;
} TDLObjectCountingInfo;
【成员】
数据类型枚举类 |
注释 |
frame_id |
帧id |
frame_width |
帧宽度 |
frame_height |
帧长度 |
enter_num |
进入的数量 |
miss_num |
出去的数量 |
counting_line |
穿越线,通常位于关键通道口 |
object_meta |
目标物体数据 |
image |
用于检测的原始图像 |
4.25. TDLIspMeta¶
【说明】
isp数据
【定义】
typedef struct {
float awb[3]; // rgain, ggain, bgain
float ccm[9]; // rgb[3][3]
float blc;
} TDLIspMeta;
【成员】
数据类型枚举类 |
注释 |
awb |
白平衡信息 |
ccm |
颜色信息 |
blc |
黑电平信息 |
5. TDL_SDK API参考¶
5.1. 句柄¶
【语法】
typedef void *TDLHandle;
typedef void *TDLHandleEx;
typedef void *TDLImage;
【描述】
TDL_SDK句柄,TDLHandle是核心操作句柄,TDLHandleEx是扩展操作句柄,TDLImage是图像数据抽象句柄。
5.2. TDL_CreateHandle¶
【语法】
TDLHandle TDL_CreateHandle(const int32_t tpu_device_id);
【描述】
创建一个 TDLHandle 对象,用于 tdl api 的管理,在使用核心库(libtdl_core.a或libtdl_core.so)中的api时使用。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
const int32_t |
tpu_device_id |
指定 TPU 设备的 ID,默认设备ID为0,目前暂未开放其他ID的使用 |
5.3. TDL_CreateHandleEx¶
【语法】
TDLHandleEx TDL_CreateHandleEx(const int32_t tpu_device_id);
【描述】
创建一个 TDLHandleEx 对象,用于 tdl 拓展 api 的管理,在使用拓展库(libtdl_ex.a或libtdl_ex.so)中的api时使用。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
const int32_t |
tpu_device_id |
指定 TPU 设备的 ID,默认设备ID为0,目前暂未开放其他ID的使用 |
5.4. TDL_DestroyHandle¶
【语法】
int32_t TDL_DestroyHandle(TDLHandle handle);
【描述】
销毁一个 TDLHandle 对象,在使用核心库(libtdl_core.a或libtdl_core.so)中的api时使用。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
需要销毁的 TDLHandle 对象 |
5.5. TDL_DestroyHandleEx¶
【语法】
int32_t TDL_DestroyHandleEx(TDLHandleEx handle);
【描述】
销毁一个 TDLHandleEx 对象,在使用拓展库(libtdl_ex.a或libtdl_ex.so)中的api时使用。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandleEx |
handle |
需要销毁的 TDLHandleEx 对象 |
5.6. TDL_WrapVPSSFrame¶
【语法】
TDLImage TDL_WrapVPSSFrame(void *vpss_frame, bool own_memory);
【描述】
包装一个 VPSS 帧为 TDLImage 对象,这里的frame可以是通过多媒体接口获得的frame (例如CVI_VPSS_GetChnFrame);也可以是自己封装的一个frame,示例如下
VIDEO_FRAME_INFO_S Frame;
memset(&Frame, 0, sizeof(VIDEO_FRAME_INFO_S));
Frame.stVFrame.pu8VirAddr[0] = buffer; // 数据的虚拟地址
Frame.stVFrame.u32Height = 1; // 数据的高度,示例为一维数据,所以这里为1
Frame.stVFrame.u32Width = u32BufferSize; // 数据的宽度,示例为一维数据,这里就是数据量
TDLImage image = TDL_WrapVPSSFrame((void *)&Frame, false); // 调用接口创建图像
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
void* |
vpss_frame |
需要包装的 VPSS 帧 |
输入 |
bool |
own_memory |
是否拥有内存所有权,该功能暂未实现,默认为false |
5.7. TDL_ReadImage¶
TDLImage TDL_ReadImage(const char *path);
【描述】
读取一张图片为 TDLImage 对象,支持jpg, png, bmp, jp2, sr和tiff等常见格式的输入。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
const char* |
path |
图片路径 |
5.8. TDL_ReadBin¶
【语法】
TDLImage TDL_ReadBin(const char *path, int count, TDLDataTypeE data_type);
【描述】
读取文件内容为 TDLImage 对象。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
const char* |
path |
bin文件路径 |
输入 |
int |
count |
文件中数据量 |
输入 |
TDLDataTypeE |
data_type |
输入数据类型 |
5.9. TDL_DestroyImage¶
【语法】
int32_t TDL_DestroyImage(TDLImage image_handle);
【描述】
销毁一个 TDLImage 对象,在结束对一个 TDLImage 对象的使用时,一定要调用此接口释放内存。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLImage |
image_handle |
需要销毁的 TDLImage 对象 |
5.10. TDL_OpenModel¶
【语法】
int32_t TDL_OpenModel(TDLHandle handle,
const TDLModel model_id,
const char *model_path,
const char *model_config_json);
【描述】
加载指定类型的模型到 TDLHandle 对象中,对于参数 model_config_json,若使用 TDL_LoadModelConfig 加载后可以传入NULL; 不使用TDL_LoadModelConfig加载,大部分专有模型也可以传入NULL,此时会使用算法类内部的默认配置, 部分通用模型如特征提取、声音指令等需要传入模型配置信息,可以参考configs/model/model_config.json。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
const char* |
model_path |
模型文件路径 |
输入 |
const char* |
model_config_json |
模型配置文件的路径,文件路径在tdl_sdk/install/CV184X/configs/model/中,如果模型不需要设定特别的参数,可以为NULL |
5.11. TDL_OpenModelFromBuffer¶
【语法】
int32_t TDL_OpenModelFromBuffer(TDLHandle handle,
const TDLModel model_id,
const uint8_t *model_buffer,
uint32_t model_buffer_size,
const char *model_config_json);
【描述】
加载指定类型的模型到 TDLHandle 对象中,使用地址来传参。对于参数 model_config_json,若使用 TDL_LoadModelConfig 加载后可以传入NULL; 不使用TDL_LoadModelConfig加载,大部分专有模型也可以传入NULL,此时会使用算法类内部的默认配置, 部分通用模型如特征提取、声音指令等需要传入模型配置信息,可以参考configs/model/model_config.json。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
const uint8_t* |
model_buffer |
模型文件buffer |
输入 |
uint32_t |
model_buffer_size |
模型文件buffer大小 |
输入 |
const char* |
model_config_json |
模型配置文件的路径,文件路径在tdl_sdk/install/CV184X/configs/model/中,如果模型不需要设定特别的参数,可以为NULL |
5.12. TDL_CloseModel¶
【语法】
int32_t TDL_CloseModel(TDLHandle handle,
const TDLModel model_id);
【描述】
卸载指定类型的模型并释放相关资源。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
5.13. TDL_Detection¶
【语法】
int32_t TDL_Detection(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLObject *object_meta);
【描述】
执行指定模型的推理检测,并返回检测结果元数据,详细实例可以参考tdl_sdk/sample/c/sample_object_detection.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLObject* |
object_meta |
输出检测结果元数据 |
5.14. TDL_FaceDetection¶
【语法】
int32_t TDL_FaceDetection(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLFace *face_meta);
【描述】
执行人脸检测并返回人脸检测结果元数据,详细实例可以参考tdl_sdk/sample/c/sample_face_detection.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLFace* |
face_meta |
输出人脸检测结果元数据 |
5.15. TDL_FaceAttribute¶
【语法】
int32_t TDL_FaceAttribute(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLFace *face_meta);
【描述】
执行人脸属性分析,需配合已检测到的人脸框进行特征分析,该模型的内部会对图像进行裁剪以提高精度, 因此在调用此接口前,最好先调用 TDL_FaceDetection 以获取人脸框图, 详细实例可以参考tdl_sdk/sample/c/sample_face_attribute.c, 如果 face_meta 中没有框图数据,则不进行裁剪操作。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输入/输出 |
TDLFace* |
face_meta |
输入人脸检测结果,输出补充属性信息 |
5.16. TDL_FaceLandmark¶
【语法】
int32_t TDL_FaceLandmark(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLImage *crop_image_handle,
TDLFace *face_meta);
【描述】
执行人脸关键点检测,在已有的人脸检测结果上补充关键点坐标,该模型的内部会对图像进行裁剪以提高精度, 因此在调用此接口前,最好先调用 TDL_FaceDetection 以获取人脸框图,详细实例可以参考tdl_sdk/sample/c/sample_face_recognition.c, 如果 face_meta 中没有框图数据,则不进行裁剪操作。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLImage |
crop_image_handle |
TDLImage 对象, 裁剪后的图像,为NULL时不生效 |
输入/输出 |
TDLFace* |
face_meta |
输入人脸检测结果,输出补充关键点坐标 |
5.17. TDL_Classification¶
【语法】
int32_t TDL_Classification(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLClassInfo *class_info);
【描述】
执行通用分类识别,包含有活体识别,语音识别和手势识别等,具体可以参考tdl_sdk/sample/c/sample_classification.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLClassInfo* |
class_info |
输出分类结果 |
5.18. TDL_InstanceSegmentation¶
【语法】
int32_t TDL_InstanceSegmentation(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLInstanceSeg *inst_seg_meta);
【描述】
执行实例分割(Instance Segmentation),检测图像中每个独立目标的像素级轮廓, 具体可以参考 tdl_sdk/sample/c/sample_instance_segmentation.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLInstanceSeg* |
inst_seg_meta |
输出实例分割结果(包含mask和bbox) |
5.19. TDL_SemanticSegmentation¶
【语法】
int32_t TDL_SemanticSegmentation(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLSegmentation *seg_meta);
【描述】
执行语义分割(Semantic Segmentation),对图像进行像素级分类, 具体可以参考 tdl_sdk/sample/c/sample_semantic_segmentation.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLSegmentation* |
seg_meta |
输出分割结果(类别标签图) |
5.20. TDL_FeatureExtraction¶
【语法】
int32_t TDL_FeatureExtraction(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLFeature *feature_meta);
【描述】
提取图像的深度特征向量,为了提高检测精度,输入的image图像最好是经过裁剪或对齐等方式处理后的图像, 可以参考tdl_sdk/sample/c/sample_face_recognition.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLFeature* |
feature_meta |
输出特征向量 |
5.21. TDL_LaneDetection¶
【语法】
int32_t TDL_LaneDetection(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLLane *lane_meta);
【描述】
检测道路车道线及其属性,具体可以参考 tdl_sdk/sample/c/sample_lane_detection.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLLane* |
lane_meta |
输出车道线坐标及属性 |
5.22. TDL_Tracking¶
【语法】
int32_t TDL_Tracking(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLObject *object_meta,
TDLTracker *tracker_meta);
【描述】
多目标跟踪,基于检测结果进行跨帧目标关联,具体可以参考 tdl_sdk/sample/c/sample_tracking.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输入/输出 |
TDLObject* |
object_meta |
输入检测结果,输出补充跟踪ID |
输出 |
TDLTracker* |
tracker_meta |
输出跟踪器状态信息 |
5.23. TDL_SetSingleObjectTracking¶
【语法】
int32_t TDL_SetSingleObjectTracking(TDLHandle handle,
TDLImage image_handle,
TDLObject *object_meta,
int *set_values,
int size);
【描述】
单目追踪设置追踪目标,根据场景要和 TDL_Detection 配合使用,具体可以参考 tdl_sdk/sample/c/camera/sample_vi_single_object_tracking.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输入 |
TDLObject* |
object_meta |
当前帧检测结果 |
输入/输出 |
int* |
set_values |
追踪目标。支持以下3种形式:1. 传入目标框坐标(x1, y1, x2, y2);2. 传入图像中某个点的位置(x, y),(此时object_meta size不能为0);3. 传入object_meta中某个目标的索引,(此时object_meta size不能为0) |
输入 |
int |
size |
set_values 元素个数(只能为1或2或4) |
5.24. TDL_SingleObjectTracking¶
【语法】
int32_t TDL_SingleObjectTracking(TDLHandle handle,
TDLImage image_handle,
TDLTracker *track_meta,
uint64_t frame_id);
【描述】
执行单目追踪,具体可以参考 tdl_sdk/sample/c/camera/sample_vi_single_object_tracking.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输入 |
TDLTracker* |
track_meta |
追踪结果 |
输入 |
uint64_t |
frame_id |
帧id |
5.25. TDL_CharacterRecognition¶
【语法】
int32_t TDL_CharacterRecognition(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLOcr *char_meta);
【描述】
字符识别,支持文本检测与识别,为了提高检测精度,输入的image图像最好是经过裁剪或对齐等方式处理后的图像, 可以参考 tdl_sdk/sample/c/sample_licence_recognition.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
模型类型枚举 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLOcr* |
char_meta |
输出识别结果(文本内容和位置) |
5.26. TDL_LoadModelConfig¶
【语法】
int32_t TDL_LoadModelConfig(TDLHandle handle,
const char *model_config_json_path);
【描述】
加载模型配置信息,加载后可以仅通过模型id去打开模型。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const char* |
model_config_json_path |
模型配置文件路径,如果为NULL,默认使用configs/model/model_config.json |
5.27. TDL_SetModelDir¶
【语法】
int32_t TDL_SetModelDir(TDLHandle handle,
const char *model_dir);
【描述】
设置模型文件夹路径,该文件夹下的子文件夹必须要以cv181x等平台名称命名,在子文件夹中放置模型文件。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const char* |
model_dir |
为tdl_models仓库路径(下面各平台的子文件夹) |
5.28. TDL_SetModelThreshold¶
【语法】
int32_t TDL_SetModelThreshold(TDLHandle handle,
const TDLModel model_id,
float threshold);
【描述】
设置模型的阈值,设置范围为(0,1)。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
要设置的模型类型枚举值 |
输入 |
float |
threshold |
模型的阈值 |
5.29. TDL_IspClassification¶
【语法】
int32_t TDL_IspClassification(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLIspMeta *isp_meta,
TDLClass *class_info);
【描述】
执行ISP图像分类任务。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
指定目标分类模型类型枚举值 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输入 |
TDLIspMeta* |
isp_meta |
输入参数,包含isp相关的数据 |
输出 |
TDLClass* |
class_info |
输出参数,存储目标分类结果 |
5.30. TDL_Keypoint¶
【语法】
int32_t TDL_Keypoint(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLKeypoint *keypoint_meta);
【描述】
执行关键点检测任务,为了提高检测精度,输入的image图像最好是经过裁剪处理后的图像, 具体例子可以参考tdl_sdk/sample/c/sample_keypoints.c
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
指定关键点检测模型类型枚举值 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输出 |
TDLKeypoint* |
keypoint_meta |
输出参数,存储检测到的关键点坐标及置信度 |
5.31. TDL_DetectionKeypoint¶
【语法】
int32_t TDL_DetectionKeypoint(TDLHandle handle,
const TDLModel model_id,
TDLImage image_handle,
TDLObject *object_meta,
TDLImage *crop_image_handle);
【描述】
执行关键点检测任务(根据目标的坐标进行裁剪后再执行关键点检测),如果 object_meta 中包含框图信息, 则 api 内部会对image图像进行裁剪;因此为了提高图像精度,在使用该 api 前最好先调用 TDL_Detection 以获得目标框图信息。具体可以参考 tdl_sdk/sample/c/sample_detect_keypoints.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const TDLModel |
model_id |
指定关键点检测模型类型枚举值 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输入/输出 |
TDLObject* |
object_meta |
输出参数,存储检测到的关键点坐标及置信度 |
输出 |
TDLImage* |
crop_image_handle |
保存裁剪后的图像,以便后续操作,如果传入 NULL 则不保存 |
5.32. TDL_IntrusionDetection¶
【语法】
int32_t TDL_IntrusionDetection(TDLHandle handle,
TDLPoints *regions,
TDLBox *box,
bool *is_intrusion);
【描述】
执行入侵检测,具体可以参考 tdl_sdk/sample/c/sample_intrusion_detection.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
TDLPoints* |
regions |
背景区域点集数组 |
输入 |
TDLBox* |
box |
检测区域bbox |
输出 |
bool* |
is_intrusion |
输出参数,存储入侵检测结果 |
5.33. TDL_MotionDetection¶
【语法】
int32_t TDL_MotionDetection(TDLHandle handle,
TDLImage background,
TDLImage detect_image,
TDLObject *roi,
uint8_t threshold,
double min_area,
TDLObject *obj_meta);
【描述】
执行移动侦测任务,具体可以参考 tdl_sdk/sample/c/sample_motion_detection.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
TDLImage |
background |
背景图像 |
输入 |
TDLImage |
detect_image |
检测图像 |
输入 |
TDLObject* |
roi |
检测区域 |
输入 |
uint8_t |
threshold |
阈值 |
输入 |
double |
min_area |
最小面积 |
输出 |
TDLObject* |
obj_meta |
输出参数,存储检测结果 |
5.34. TDL_APP_Init¶
【语法】
int32_t TDL_APP_Init(TDLHandle handle,
const char *task,
const char *config_file,
char ***channel_names,
uint8_t *channel_size);
【描述】
初始化APP任务,执行抓拍,客流量计数等复杂的场景,模型配置参数主要在 config_file 中配置, 具体例子可以参考 tdl_sdk/sample/c/camera/sample_vi_face_pet_cap.c。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const char* |
task |
APP任务名称 |
输入 |
const char* |
config_file |
APP的json配置文件路径,tdl提供了模板,路径在 tdl_sdk/sample/c/config |
输出 |
char*** |
channel_names |
每一路视频流的名称信息 |
输出 |
uint8_t* |
channel_size |
视频流的路数 |
5.35. TDL_APP_SetFrame¶
【语法】
int32_t TDL_APP_SetFrame(TDLHandle handle,
const char *channel_name,
TDLImage image_handle,
uint64_t frame_id,
int buffer_size);
【描述】
往APP场景送帧。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const char* |
channel_name |
当前channel的名称 |
输入 |
TDLImage |
image_handle |
TDLImage 对象 |
输入 |
uint64_t |
frame_id |
当前TDLImage 对象的frame id |
输入 |
int |
buffer_size |
推理线程缓存的帧数 |
5.36. TDL_APP_Capture¶
【语法】
int32_t TDL_APP_Capture(TDLHandle handle,
const char *channel_name,
TDLCaptureInfo *capture_info);
【描述】
执行抓拍任务,可以抓拍人脸,宠物等目标,主要依据配置文件决定,配置文件在 TDL_APP_Init 中调用。
【参数】
数据型态 |
参数名称 |
说明 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const char* |
channel_name |
当前channel的名称 |
输出 |
TDLCaptureInfo* |
capture_info |
抓拍结果 |
5.37. TDL_APP_ObjectCounting¶
【语法】
int32_t TDL_APP_ObjectCounting(TDLHandle handle,
const char *channel_name,
TDLObjectCountingInfo *object_counting_info);
【描述】
执行客流统计(TDL_APP_Init task 为consumer_counting)或越界检测任务 (TDL_APP_Init task 为cross_detection)
【参数】
数据类型 |
参数名称 |
描述 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const char* |
channel_name |
当前通道名称 |
输出 |
TDLObjectCountingInfo* |
object_counting_info |
统计/检测结果 |
5.38. TDL_APP_ObjectCountingSetLine¶
【语法】
int32_t TDL_APP_ObjectCountingSetLine(TDLHandle handle,
const char *channel_name, int x1,
int y1, int x2, int y2, int mode);
【描述】
客流统计或越界检测运行过程中重新设置画线位置。
【参数】
数据类型 |
参数名称 |
描述 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDLHandle 对象 |
输入 |
const char* |
channel_name |
当前通道名称 |
输入 |
int |
x1 |
端点1横坐标 |
输入 |
int |
y1 |
端点1纵坐标 |
输入 |
int |
x2 |
端点2横坐标 |
输入 |
int |
y2 |
端点2纵坐标 |
输入 |
int |
mode |
对于客流统计: mode为0时, 对于竖直线, 从左到右为进入, 对于非竖直线,从上到下为进入, mode为1相反。对于越界检测: mode为0时, 对于竖直线, 从左到右为越过, 对于非竖直线,从上到下为越过, mode为1相反, mode为2双向检测 |
5.39. TDL_WrapImage¶
【语法】
int32_t TDL_WrapImage(TDLImage image,
void *frame);
【描述】
将TDLImage包装为 VIDEO_FRAME_INFO_S 对象。
【参数】
数据类型 |
参数名称 |
描述 |
|
|---|---|---|---|
输入 |
TDLImage |
image |
TDLImage 对象 |
输出 |
VIDEO_FRAME_INFO_S* |
frame |
输出参数,存储包装后的帧信息 |
5.40. TDL_LLMApiCall¶
【语法】
int32_t TDL_LLMApiCall(TDLHandle handle, const char *client_type,
const char *method_name, const char *params_json,
char *result_buf, size_t buf_size)
【描述】
向指定的LLM客户端发起调用请求,具体例子可以参考 tdl_sdk/sample/c/sample_llm_api.c。
【参数】
数据类型 |
参数名称 |
描述 |
|
|---|---|---|---|
输入 |
TDLHandle |
handle |
TDL_CreateHandle返回的上下文句柄 |
输入 |
const char* |
client_type |
LLM客户端类型 |
输入 |
const char* |
method_name |
调用的接口方法名 |
输入 |
const char* |
params_json |
请求体的json字符串 |
输入 |
size_t |
buf_size |
result_buf可用空间大小 |
输出 |
char* |
result_buf |
存放调用返回的JSON结果或错误信息 |
6. TDL_SDK 模型部署方式¶
借助TDL_SDK框架,可以使新模型集成变得更加简单,框架可以帮助完成如下工作:
图像预处理,用户只需配置预处理参数,框架内会自动调用预处理设备实现预处理
模型推理,无需编写任何推理相关代码
内存管理,框架内会自动管理内存,用户无需担心内存泄漏问题
6.1. 现有模型类添加新模型文件¶
现有模型在已在第三章中展示,如需添加新的模型文件,只是需要在模型工厂中添加对应的新模型ID方便调用,操作步骤如下:
在 tdl_sdk/install/CV184X/include/nn/tdl_model_list.h 中添加新模型的model_id;
在 tdl_sdk/src/components/nn/tdl_model_factory.cpp 中添加新模型的创建函数;
在 tdl_sdk/configs/model/model_factory.json 中添加新模型的配置信息。
6.2. 集成新的模型类型¶
在 tdl_sdk/src/componets/nn 目录下,根据新模型的任务类型,选择合适的文件夹,假如没有匹配的,就新建一个该任务类型的文件夹;
在文件夹内添加新模型的头文件和源文件,头文件派生自 tdl_sdk/include/framework/model/base_model.hpp,源文件实现函数 tdl_sdk/include/framework/model/base_model.hpp;
在 tdl_sdk/include/nn/tdl_model_list.h创建新的模型ID;
在 tdl_sdk/src/components/nn/tdl_model_factory.cpp 中添加新模型的创建函数;
在 tdl_sdk/configs/model/model_factory.json 中添加新模型的配置信息;
YOLO系列模型编译可以参考文档《YOLO系列开发指南》,其他类型模型,直接按照标准流程进行编译。
7. TDL_SDK c sample使用方式¶
以下例子均以cv181x的板端为例,使用模型请更新实际情况替换。
7.1. sample_character_recognition¶
用于车牌识别场景,支持输入车牌图片,输出识别到的车牌字符文本信息。运行方式如下:
./sample_character_recognition --m ./cv181x/recognition_license_plate_24_96_MIX_cv181x.cvimodel -i ./license_plate_keypoints_0.jpg
// -m 输入模型 -i 输入图像
输入图像为一张车牌的图片,运行结果将会在串口打印 txt info: 闽D999PN

7.2. sample_classification¶
用于声音分类和图像分类场景,支持输入音频bin文件或图片文件,输出其类别信息和置信度分数。音频识别的运行方式如下:
./sample_classification -m ./cv181x/baby_cry_cnn10_188_40_INT8_cv181x.cvimodel -b ./test_inputs/laugh_1_m4a_3_1.bin -r 16000 -t 3
// -m 输入模型 -b 输入音频bin文件 -r 采样率 -t 音频时长
输入一段音频数据,以及音频数据的采样率和时长,例程将会对音频进行识别,并输出其分数。
图片识别的运行方式如下:
./sample_classification -m ./cv181x/cls_hand_gesture_128_128_INT8_cv181x.cvimodel -i ./test_inputs/hand_two.jpg
// -m 输入模型 -i 输入图像
这里以手势识别为例,输入一张手势图像,将会输出手势以及他的分数。具体的串口打印如下
pred_lable: 0, score = 0.964321
7.3. sample_detect_keypoints¶
用于多目标关键点检测场景,支持输入单张图片,输出手部、车牌或人体姿态的关键点坐标信息。运行方式如下:
./sample_detect_keypoints -m./cv181x/hand_detection_yolov8n_mv3_050_INT8_cv181x.cvimodel,./cv181x/keypoint_hand_128_128_INT8_cv181x.cvimodel -i ./test_inputs/hand.jpg -o out_d.jpg,out_c.jpg
// -m 输入模型,这个sample需要输入两个模型,分别是检测类模型和关键点类的模型
// -i 输入图像
// -o 输出图像,可以不输入。输出两张图像,一张是检测画框的原图,一张是裁剪后的图片
这里输入一张手部图像,算法将会识别它的关键点,这里的关键点为比例系数,乘上对应的长宽即为坐标点。
obj_meta id: 0, [x, y]: 0.667969, 0.796875
obj_meta id: 0, [x, y]: 0.726562, 0.683594
obj_meta id: 0, [x, y]: 0.683594, 0.570312
obj_meta id: 0, [x, y]: 0.578125, 0.531250
obj_meta id: 0, [x, y]: 0.484375, 0.523438
obj_meta id: 0, [x, y]: 0.578125, 0.451172
obj_meta id: 0, [x, y]: 0.546875, 0.314453
obj_meta id: 0, [x, y]: 0.539062, 0.225586
obj_meta id: 0, [x, y]: 0.523438, 0.153320
obj_meta id: 0, [x, y]: 0.484375, 0.500000
obj_meta id: 0, [x, y]: 0.345703, 0.386719
obj_meta id: 0, [x, y]: 0.250000, 0.314453
obj_meta id: 0, [x, y]: 0.168945, 0.257812
obj_meta id: 0, [x, y]: 0.427734, 0.570312
obj_meta id: 0, [x, y]: 0.322266, 0.500000
obj_meta id: 0, [x, y]: 0.427734, 0.539062
obj_meta id: 0, [x, y]: 0.500000, 0.578125
obj_meta id: 0, [x, y]: 0.386719, 0.652344
obj_meta id: 0, [x, y]: 0.330078, 0.597656
obj_meta id: 0, [x, y]: 0.417969, 0.605469
obj_meta id: 0, [x, y]: 0.484375, 0.628906
依据关键点对图像进行标记的图片如下:
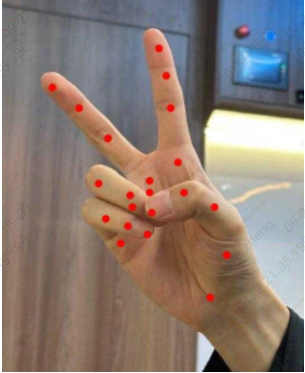
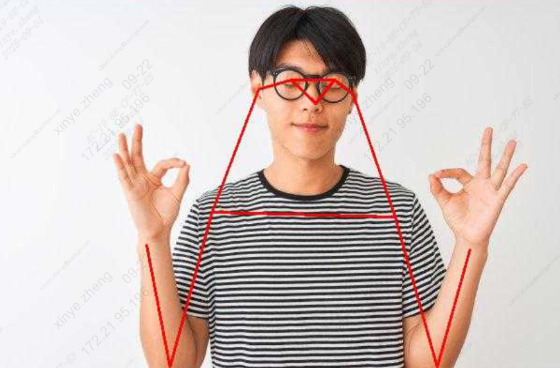
7.4. sample_keypoints¶
用于多类型关键点检测,支持输入单张图片,输出手部/车牌/人体姿态的关键点坐标信息及可视化标注图像, 与sample_detect_keypoints不同的是,这个接口需要输入一张已经裁剪后的图像。运行方式如下:
./sample_keypoints -m ./cv181x/keypoint_hand_128_128_INT8_cv181x.cvimodel -i ./test_inputs/hand.jpg -o out.jpg
// -m 输入模型 -i 输入图像 -o 输出图像,可以不输入
这里输入一张手部图像,算法将会识别它的关键点,依据关键点对图像进行标记的图片如下:
7.5. sample_face_attribute¶
用于人脸检测与属性分析场景,支持输入单张图片,输出人脸位置及性别、年龄、眼镜、口罩等属性信息。运行方式如下:
./sample_face_attribute -m ./cv181x/scrfd_500m_bnkps_432_768.cvimodel,./cv181x/face_attribute_cls.cvimodel -i ./test_inputs/face.jpg
// -m 输入模型,这个sample需要输入两个模型,分别是人脸检测和人脸属性识别
// -i 输入图像
这里输入一张人脸图像,算法将识别人脸的各个属性输入图像和结果如下所示:

gender score: 0.992188, age score: 0.640625, glass score: 0.992188, mask score: 0.000000
Gender:Male
Age:Male
Glass:Yes
Mask:no
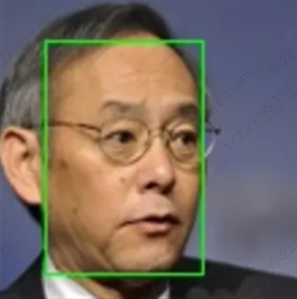
7.6. sample_face_detection¶
用于通用人脸检测,支持输入单张图片,输出带有人脸检测框标记的结果图像,并框输出人脸框的左上角的xy坐标和右下角的xy坐标,和置信度分数。运行方式如下:
./sample_face_detection -i ./test_inputs/face.jpg -m ./cv181x/scrfd_det_face_432_768_INT8_cv181x.cvimodel -o ./test_inputs/face_det.jpg
// -m 输入模型 -i 输入图像 -o 输出图像,可以不输入
这里输入一张人脸图片,依据输出框图对人脸进行标记
7.7. sample_feature_extraction¶
用于人脸比对场景,支持输入两张人脸图片,输出其相似度分数及中间处理结果图像。运行方式如下:
./sample_face_landmark -m ./cv181x/keypoint_face_v2_64_64_INT8_cv181x.cvimodel -i ./test_inputs/face.jpg
// -m 输入模型 -i 输入图像
这里输入两个图像,用于特征提取后的对比,输入两个一样的图像时,相似度为1。
similarity is 1.000000
7.8. sample_face_landmark¶
用于人脸关键点检测场景,输出图像的模糊度得分以及五个人脸关键点坐标点。运行方式如下:
./sample_face_landmark -m ./cv181x/keypoint_face_v2_64_64_INT8_cv181x.cvimodel -i ./test_inputs/face.jpg
// -m 输入模型 -i 输入图像
依据输入图像,串口将输出关键点信息
landmarks id : 0, landmarks x : 43.531250, landmarks y : 51.625000
landmarks id : 1, landmarks x : 73.500000, landmarks y : 51.625000
landmarks id : 2, landmarks x : 63.875000, landmarks y : 65.187500
landmarks id : 3, landmarks x : 45.937500, landmarks y : 82.250000
landmarks id : 4, landmarks x : 68.687500, landmarks y : 81.375000
7.9. sample_instance_segmentation¶
用于实例分割场景,输入一张图片数据,输出各个实例的坐标框和轮廓坐标点。运行方式如下:
./sample_instance_segmentation -i ./test_inputs/coco.jpg -o ./test_inputs/coco_o.jpg -m ./cv181x/segmentation_yolov8n_640_640_INT8_cv181x.cvimodel
// -m 输入模型 -i 输入图像 -o 输出图像,可以不输入
这里输入一张图片,算法将会对其进行分割

7.10. sample_lane_detection¶
用于车道线检测场景,支持输入道路图像,输出检测到的车道线坐标信息。运行方式如下:
./sample_lane_detection -m ./cv181x/lstr_det_lane_360_640_MIX_cv181x.cvimodel -i ./test_inputs/result.jpg -o ./out.jpg
// -m 输入模型 -i 输入图像 -o 输出图像,可以不输入
这里输入一张车道线的图片,串口将会打印车道线信息:
lane 0
0: 506.925018 432.000031
1: 362.094147 576.000000
lane 1
0: 815.652710 432.000031
1: 1038.046509 576.000000
依据结果对图像进行标记:

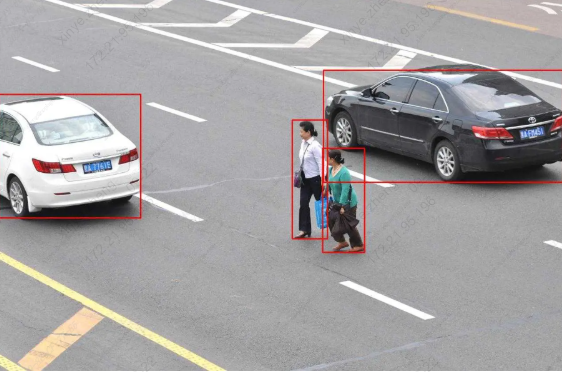
7.11. sample_object_detection¶
用于通用目标检测sample,输出目标框的左上角的xy坐标和右下角的xy坐标,类别和置信度, 具体适配哪些模型可参看sample_object_detection .c中的get_od_model_info进行参看。运行方式如下:
./sample_object_detection -m ./cv181x/coco80_detection_yolov10n_640_640_INT8_cv181x.cvimodel -i ./test_inputs/coco.jpg -o ./out.jpg
// -m 输入模型 -i 输入图像 -o 输出图像,可以不输入
这里输入一张图片,串口将会打印识别到的物体类别及框图
obj_meta_index : 0, class_id : 0 , score : 0.943986, boxx : [2.527201 327.880676 226.529968 507.681152]
obj_meta_index : 1, class_id : 0 , score : 0.918415, boxx : [740.277466 1285.450562 171.033188 427.008545]
obj_meta_index : 2, class_id : 4 , score : 0.850404, boxx : [738.621460 834.782410 348.960632 586.001221]
obj_meta_index : 3, class_id : 4 , score : 0.800627, boxx : [669.198853 750.732361 284.652740 555.387817]
依据结果对图像进行标记:
7.12. sample_pose¶
用于人体姿态估计,支持输入单张图片,输出17个人体关键点坐标及骨架连接信息,并生成带关键点和骨架标注的可视化结果图。运行方式如下:
./sample_pose -m ./cv181x/keypoint_yolov8pose_person17_384_640_INT8_cv181x.cvimodel -i ./test_inputs/person.jpg -o ./test_inputs/person_out.jpg
// -m 输入模型 -i 输入图像 -o 输出图像,可以不输入
这里输入一张图片,串口将会姿态的坐标点和分数
obj_meta_index : 0, class_id : 0[79270.104763], score : 0.934758, bbox : [45.138302 249.390228 102.585884 354.314575]
pose : 0: 142.950653 160.520309 0.980407
pose : 1: 149.029053 148.363525 0.924847
pose : 2: 124.715469 148.363525 0.962615
pose : 3: 161.185822 154.441910 0.573295
pose : 4: 100.401848 166.598709 0.814048
pose : 5: 197.656219 221.304276 0.962615
pose : 6: 82.166672 245.617874 0.986373
pose : 7: 228.048203 324.637054 0.802613
pose : 8: 63.931477 336.793823 0.924847
pose : 9: 136.872238 342.872223 0.778173
pose : 10: 88.245079 257.774658 0.901571
pose : 11: 191.577805 379.342621 0.573295
pose : 12: 112.558662 391.499390 0.676617
pose : 13: 161.185822 403.656189 0.070180
pose : 14: 100.401848 397.577789 0.098429
pose : 15: 100.401848 391.499390 0.012670
pose : 16: 106.480255 367.185822 0.015762
依据结果对图像进行标记:
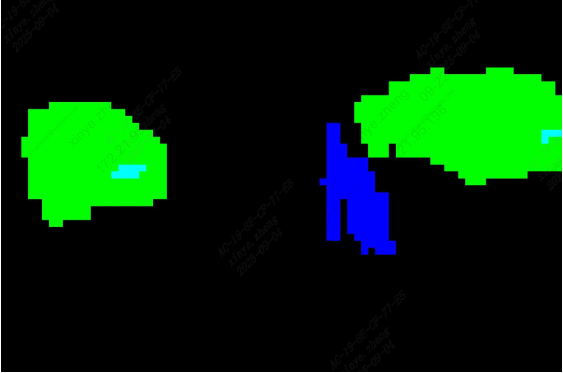
7.13. sample_semantic_segmentation¶
用于语义分割场景,输入一张图片数据,输出各个像素点的类别信息。运行方式如下:
./sample_semantic_segmentation -m ./cv181x/topformer_seg_person_face_vehicle_384_640_INT8_cv181x.cvimodel -i ./test_inputs/topformer.jpg -o out.jpg
// -m 输入模型 -i 输入图像 -o 输出图像,可以不输入
这里输入一张图片,串口将会打印图像各个像素图点对应的类别
7.14. sample_tracking¶
对输入的图片组进行追踪。运行方式如下:
./sample_tracking -m ./cv181x/scrfd_det_face_432_768_INT8_cv181x.cvimodel,./cv181x/mbv2_det_person_512_896_INT8_cv181x.cvimodel -i input -o output
// -m 输入模型,这个sample需要输入两个个模型,分别是人脸检测和行人检测
// -i 输入图像文件夹,文件夹下包含了一组图片,图片需要按照xxx_001.jpg,xxx_002.jpg这样的顺序排列,如下图
// -o 输出图像文件夹
输入的图片组示例:
输入的图片组示例:
7.15. sample_face_recognition¶
识别人脸并进行特征匹配,人脸检测->人脸特征点提取->人脸特征值提取->特征点比较。运行方式如下:
./sample_face_recognition -m ./cv181x/scrfd_det_face_432_768_INT8_cv181x.cvimodel,./cv181x/keypoint_face_v2_64_64_INT8_cv181x.cvimodel,./cv181x/feature_cviface_112_112_INT8_cv181x.cvimodel -i ./test_inputs/face.jpg,./test_inputs/face.jpg -c ./model_factory.json
// -m 输入模型,这个sample需要输入三个模型,分别是人脸检测,人脸特征点,人脸特征值
// -i 输入图像,这个sample需要输入两张图像,用于提取特征值后的人脸比对
// -c config参数,记录了模型的参数设置
输入两张一样的图像,得到的特征值相似度一致
similarity is 1.000000
7.16. sample_licence_recognition¶
识别车牌,检测->关键点->识别,支持一张图片多个车牌。运行方式如下:
./sample_licence_recognition -m ./cv181x/yolov8n_det_license_plate_384_640_INT8_cv181x.cvimodel,./cv181x/keypoint_license_plate_64_128_INT8_cv181x.cvimodel,./cv181x/recognition_license_plate_24_96_MIX_cv181x.cvimodel -i ./test_inputs/out_vertical_cv.jpg
// -m 输入模型,这个sample需要输入三个模型,分别是车牌检测,车牌关键点点,车牌识别
// -i 输入图像
这里输入一张包含两个车牌的图像:

串口将有如下打印:
id = 0, txt info: 闽D999PN
id = 1, txt info: 闽D999PN
7.17. sample_vi_detection¶
连接摄像头进行物体识别。将sensor_cfg.ini(sensor的配置文件可以联系开发者获取)放置在/mnt/data目录下,并使用下列命令运行:
./sample_vi_detection -m ./cv181x/yolov8n_det_hand_384_640_INT8_cv181x.cvimodel -c 0
// -m 输入模型,这里的例子为手部检测
// -c vi的chn,单sensor的情况下为0
// -f config参数,记录了模型的参数设置,可以不输入
这里以手部检测为例,将会打印出检测到的手部的信息
obj_meta_index : 0, class_id : 0, score : 0.861538, bbox : [260.416077 601.567139 103.850037 312.489624]
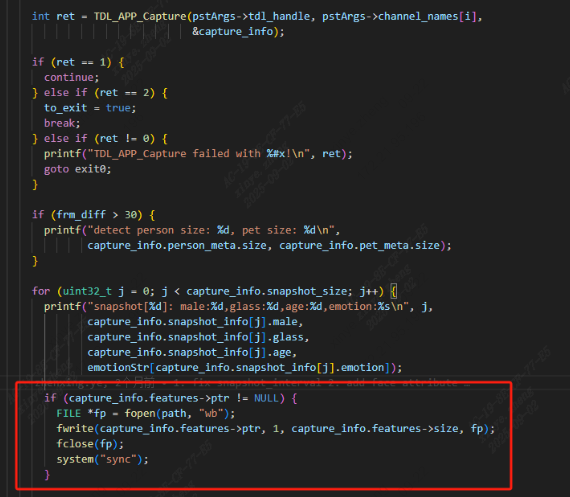
7.18. sample_vi_face_pet_cap¶
连连接摄像头进行人脸宠物抓拍,如果有输入-g的参数,则会进行特征点识别,如果有-o的参数,则将抓拍的图像保存下来。
//json文件解析,在使用的过程中,model_dir和model_config一定要根据实际情况修改
{
"model_dir": "/mnt/sd/models/", //模型的路径,后面会自动匹配cv181x,cv184x等,因此实际的模型路径为/mnt/sd/models/cv181x,这里一定要将模型先放置在cv181x(依据板端类型修改)的文件夹下,再放置在model_dir的路径下
"model_config": "/mnt/sd/configs/model/model_factory.json", //模型的参数文件
"frame_buffer_size": 1,
"pipelines": [
{
"name": "face_pet_cap",
"nodes": {
"object_detection_node": {
"config_thresh": 0.5
},
"track_node": {
"fuse_track": true
},
"snapshot_node": { //抓拍参数
"snapshot_interval": 5,
"min_snapshot_size": 40,
"crop_size_min": 128,
"crop_size_max": 256,
"snapshot_quality_threshold": 0,
"crop_square": true
}
}
}
]
}
gallery文件夹在tdl中不提供,需要自己生成, 注意必须是0.bin,1.bin……这样的格式。 特征值可以使用TDL_FeatureExtraction获取(参数上述的TDL_FeatureExtraction), 也可以在本sample中的TDLCaptureInfo结构体中获取,在TDL_APP_Capture后, 如果识别到人脸,则TDLCaptureInfo中的TDLFeature参数中的prt会记录特征值,将其保存为文件,下图为参考
将sensor_cfg.ini(sensor的配置文件可以联系开发者获取)放置在/mnt/data目录下,并使用下列命令运行
./sample_vi_face_pet_cap -c ./config/face_pet_cap_app.json -v 0 -g ./ipcamera/gallery/ -o out
// -m 配置json文件,记录了要使用哪些功能
// -v vi的chn,单sensor的情况下为0
// -g 特征值数据库,可以不输入
// -o 输出文件夹,可以不输入
7.19. sample_vi_consumer_counting¶
连接摄像头进行客流量统计。运行方式如下:
./sample_vi_consumer_counting -c ./config/consumer_counting_app_vi.json -v 0
输出结果如下:
enter: 0, miss: 0
+++++++++++++++++++++++++++++++ frame:124, infer time:40.00, fps: 25.00
7.20. sample_vi_cross_detection¶
连接摄像头进行入侵检测。运行方式如下:
./sample_vi_cross_detection -c ./config/cross_detection_app_vi.json -v 0
输出结果如下:
cross num: 0
+++++++++++++++++++++++++++++++ frame:62, infer time:40.00, fps: 25.00
7.21. sample_vi_single_object_tracking¶
连接摄像头进行单目追踪,开始运行程序时 TDL_Detection 对目标进行检测。 当需要对某个物体或某块区域进行追踪时,按下I或i即可输入参数。 可以输入box的id(范围为0 - bj_meta.size),box的坐标(x1,y1,x2,y2)或者是一个坐标点(x,y); 输入完成后对目标进行追踪,当目标丢失超过5秒后,恢复 TDL_Detection 检测阶段。 运行方式如下:
./sample_vi_single_object_tracking -d ./cv181x/yolov8n_det_person_vehicle_384_640_INT8_cv181x.cvimodel -s ./cv181x/tracking_feartrack_128_128_256_256_INT8_cv181x.cvimodel
// -d 检测类模型 -s 追踪类模型
输出结果如下:
Usage: input i or I to start tracking ......
Enter bbox x1,y1,x2,y2 or a point x,y or bbox index to track:
0 //追踪id为0的目标
values[0] = 0
The target has been lost for more than 5 seconds, switching to detection state //当目标丢失超过5s时,回到检测状态
Usage: input i or I to start tracking ......
7.22. sample_motion_detection¶
移动检测,输入一张背景图像和检测图像。运行方式如下:
./sample_motion_detection ./test_inputs/ir.jpg ./test_inputs/ir.jpg
输出结果如下:
Running motion detection with images:
Background: ./test_inputs/ir.jpg
Detect: ./test_inputs/ir.jpg
Setting ROI regions...
Begin motion detection...
Detection completed
7.23. sample_intrusion_detection¶
入侵检测。运行方式如下:
./sample_intrusion_detection
输出结果如下:
=============矩形区域测试=============
==== 矩形区域 ====
点数: 4
点 0: (100.00, 100.00)
点 1: (300.00, 100.00)
点 2: (300.00, 200.00)
点 3: (100.00, 200.00)
内部边界框检测: 入侵
外部边界框检测: 未入侵
=============凹多边形区域测试=============
==== 凹多边形区域 ====
点数: 6
点 0: (100.00, 100.00)
点 1: (200.00, 50.00)
点 2: (300.00, 100.00)
点 3: (250.00, 150.00)
点 4: (200.00, 120.00)
点 5: (150.00, 150.00)
内部边界框检测: 入侵
外部边界框检测: 未入侵
测试完成!
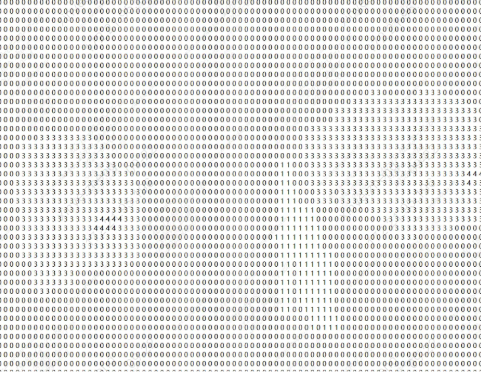
8. 常见问题¶
8.1. 模型打开失败类问题¶
缺乏model_config_json
[tdl_model_factory.cpp:80] [I] input model config file is empty, load model config from /configs/model/model_factory.json
[tdl_model_factory.cpp:87] [E] model config file not found: /configs/model/model_factory.json
[tdl_model_factory.cpp:238] [E] model config not found for model type: YOLOV8N_DET_PERSON_VEHICLE
[tdl_model_factory.cpp:248] [I] getModelInstance model_type:YOLOV8N_DET_PERSON_VEHICLE
[tdl_model_factory.cpp:526] [I] createObjectDetectionModel success,model type:5,category:0
[tdl_model_factory.cpp:831] [I] model_path: ./cv184x/yolov8n_det_person_vehicle_384_640_INT8_cv181x.cvimodel
[tdl_model_factory.cpp:238] [E] model config not found for model type: TRACKING_FEARTRACK
[tdl_model_factory.cpp:248] [I] getModelInstance model_type:TRACKING_FEARTRACK
[tdl_model_factory.cpp:831] [I] model_path: ./tracking_feartrack_128_128_256_256_INT8_cv181x.cvimodel
[base_model.cpp:159] [E] mean or std size is not 3
[base_model.cpp:42] [E] Net setup failed
可以看出来参数缺乏mean和std,这是因为在调用TDL_OpenModel时没有传参model_config_json,大部分专有模型是不需要传入的; 部分通用模型如特征提取、声音指令等需要传入模型配置信息,可以参考configs/model/model_config.json。