5. 模块功能¶
5.1. 黑电平¶
5.1.1. 黑电平标定方法¶
模拟信号很微弱时,有可能不被模拟至数字转换器传达出来,导致光线很暗时,图像细节丢失。因此,图像传感器会在模拟至数字转换前,给模拟信号一个固定的偏移量,保证输出的数字信号保留更多的图像细节。黑电平校正模块就是通过标定的方式,确定这个偏移量的具体值。后续的 ISP 处理模块,需要先减掉该偏移值,才能保证数据的线性一致性。
5.1.1.1. 环境及相关器材准备¶
如果事先未获取到图像传感器的黑电平参数,或者需要获得更精确的黑电平数值,本标定工具亦提供了自动标定黑电平的模式。 在标定之前需要用户手动采集黑电平标定所需输入的 Raw,采集步骤如下:
步骤1. 将设备的光圈完全关闭,或者使用镜头盖将镜头输入遮挡,确保无光线进入。
步骤2. 通过CviPQTool 的ExposureAttr 标签, 手动设定增益为 1x。具体操作方法为将Exposure 和 Exposure Manual 选框中的所有 OpType 设置为OP_TYPE_MANUAL, 同时将 Exposure Manual 选框中的AGain、DGain、 ISP Dgain 手动设置为 1024。
步骤3. 使用 CviPQTool Capture Tool 抓取一个 Raw 文件。
5.1.1.2. 黑电平标定工具界面¶
将标定工具的主功能卷标页切换到BLC,即可看到 BLC标定的界面,如 图 5.1 所示,页面主要分为两个部分:
控制区:工具进行标定的主要功能 (红色框选区域)。
显示区:显示输入图像以及 BLC标定后的结果图像 (蓝色框选区域)。
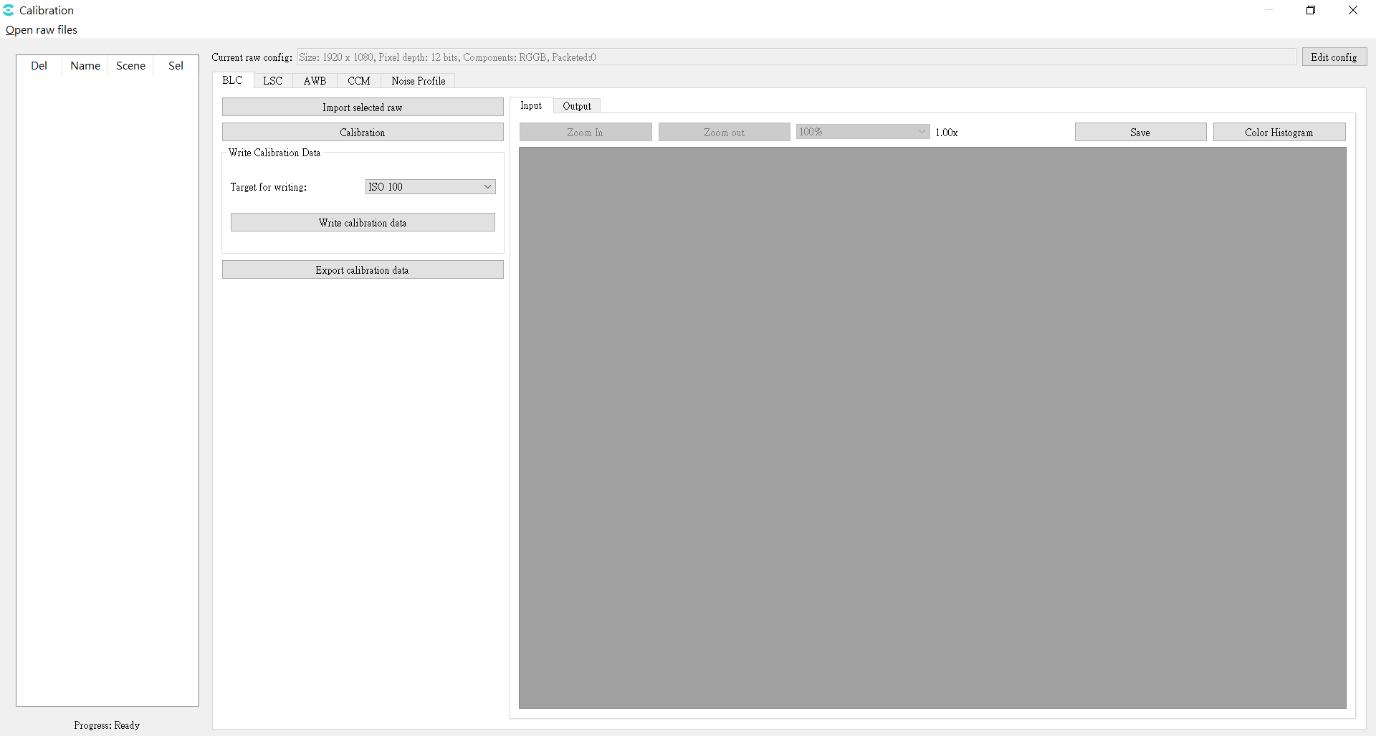
图 5.1 黑电平标定工具界面示意图¶
5.1.1.3. 黑电平标定步骤¶
采集到标定算法所需的 Raw 后, 用户可按照以下方法进行黑电平自动模式的标定:
步骤1. 在标定工具左上方Open raw files导入 Raw图档,然后在下拉选单使用Dark frame。
步骤2. 点击 Calibration 按钮,进行黑电平标定。
5.2. DPC¶
5.2.1. DPC调试方法¶
5.2.1.1. 功能描述¶
在sensor 制造中,会产生数量不等的坏点,在图像做插值 (Demosaic)或是滤波器的处理,会将坏点的扩散到周边像素。为了降低坏点对原始像素的破坏,在插值等图像处理之前,必须对坏点进行校正。
坏点可以分为两个类型:
静态坏点:
亮点: 通常像素值会正比于入射光源的亮度,亮点定义为此点的值远大于入射光乘以对应比例,且当曝光时间增加,此点的值会明显增加。
暗点: 无论原始光源的特性,此点的像素值非常接近0。
动态坏点:
在常态使用上,此点像素值正常,但随着使用时间,或是sensor 温度升高,增益变大等环境条件不同,此点会显示比周围像素亮。静态与动态坏点的侦测与校正,主要是使用5x5 的窗口,对相同颜色通道做判定与校正。
DPC 可以支持的坏点类型:
单点坏点
坏点聚集,每个颜色通道最多有3个相邻坏点
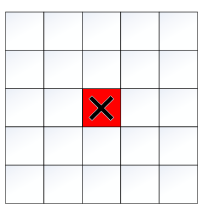
图 5.2 单一一个坏点,如下图为R坏点¶
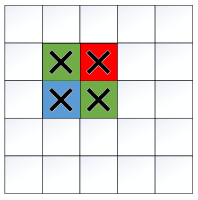
图 5.3 同样颜色通道出现两个坏点,G有连续两点坏点,而R、B坏点不会影响G的校正¶
图 5.4 同样颜色通道出现3个坏点¶
DPC 不可支持的坏点类型:
同色通道中超过3个以上的坏点聚集
5.2.1.2. 关键参数¶
DPC校正流程图如 图 5.5 所示,以及静态和动态关键参数分别如 表 5.1 和 表 5.2 所示。
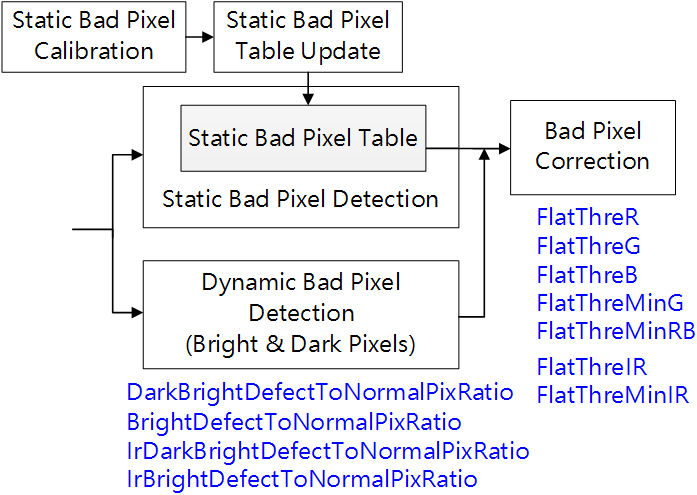
图 5.5 DPC校正流程图¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
静态坏点DPC功能使能。 0: 关闭。 1: 使能 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
DPC功能使能。 0: 关闭。 1: 使能。 |
DynamicDPCEnable |
[0, 1] |
0 |
动态坏点DPC功能使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
DPC工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
ClusterSize |
[0, 3] |
2 |
群聚坏点面积上限,值越高越能修正群聚坏点,但可能会造成高频区域解像力的衰减。 |
BrightDefectToNormalPixRatio |
[1, 255] |
128 |
可视亮坏点值与周围像素的倍率。 |
DarkDefectToNormalPixRatio |
[1, 255] |
128 |
可视暗坏点值与周围像素的倍率。 |
FlatThreR |
[0, 255] |
8 |
R通道判别平坦区临界值,值越小越能保留边缘信息。 |
FlatThreG |
[0, 255] |
8 |
G通道判别平坦区临界值,值越小越能保留边缘信息。 |
FlatThreB |
[0, 255] |
8 |
B通道判别平坦区临界值,值越小越能保留边缘信息。 |
FlatThreMinG |
[0, 255] |
15 |
G通道判别平坦区最小临界值。 |
FlatThreMinRB |
[0, 255] |
15 |
RB通道判别平坦区最小临界值。 |
5.2.1.3. 调试步骤¶
动态DPC 处理强度与ISO值非常相关,在ISO愈高的环境下,图像的噪声较多,通过增加动态DPC的强度,可以得到比较好的图像质量,但强度开太强,则会导致细节的流失和边缘的模糊,所以调试上必须针对不同sensor,与不同场景去做动态DPC强度调整。在sensor的cmos.c中会配置针对如 4.1.1列出的16个ISO值对应的参数,当实际效果不如预期时,用户可以根据下列步骤调试:
步骤1. 设定 BrightDefectToNormalPixRatio ,此为R/G/B 像素亮区坏点像素与周遭像素平均值的倍数,默认值为4倍,等同去校正4倍以上于周围像素平均值的坏点。
当 BrightDefectToNormalPixRatio 愈大时,坏点判断条件更为精准,若此时图像有残余坏点,即可将 BrightDefectToNormalPixRatio 往下调整,需注意调整太小,则会损失边缘细节。 DarkDefectToNormalPixRatio 调整同上,此为暗区坏点像素与周围像素的倍数。
步骤2. 通过调整斜率 FlatThre[R/G/B] 以及平坦区临界值 FlatThreMinG / FlatThreMinRB 来决定平坦区的临界值。以G通道平坦区临界值为例子,如 图 5.6 所示,当平坦区临界值 FlatThreMinG 设置愈小,愈可以保留图像的边缘信息,当平坦区临界值愈大,愈容易判断为平坦区,导致愈多边缘细节的损失。
—-结束
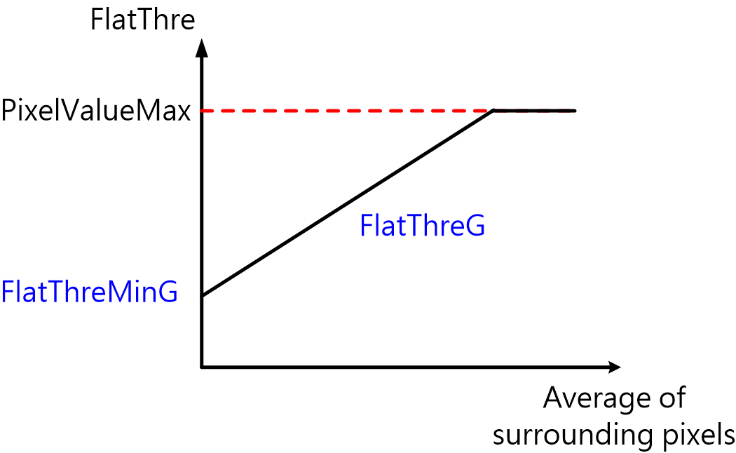
图 5.6 G通道平坦区临界值的调整示意图¶
5.3. CrossTalk Removal¶
5.3.1. CrossTalk Removal调试方法¶
5.3.1.1. 功能描述¶
Crosstalk是指sensor可能因为特殊角度的入射光,使得邻近像素的Gr与Gb值不一致,而导致在进行Demosaic插值运算后产生的方格或类似的pattern。因此,为了需要平衡邻近Gr与Gb之间的差异。
如 图 5.7 所示,横轴坐标代表Gr与Gb之间的差值Diff = |Gr - Gb|,纵轴代表对应的权重值,T1~T4是使用者可以去定义的Threshold值。当差值愈小,所得到的权重值愈大,整体图像处理的强度越大。
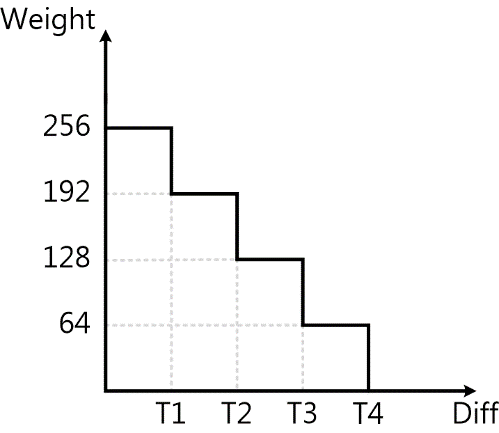
图 5.7 Crosstalk Removal权重分布图¶
5.3.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
Crosstalk功能使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
Crosstalk工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式(OP_TYPE_MANUAL)。 |
GrGbDiffThreSec1 |
[0, 4095] |
128 |
G通道平衡节点1阀值。 |
GrGbDiffThreSec2 |
[0, 4095] |
192 |
G通道平衡节点2阀值。 |
GrGbDiffThreSec3 |
[0, 4095] |
224 |
G通道平衡节点3阀值。 |
GrGbDiffThreSec4 |
[0, 4095] |
256 |
G通道平衡节点4阀值。 |
FlatThre1 |
[0, 4095] |
128 |
平坦区侦测节点1阀值。 |
FlatThre2 |
[0, 4095] |
192 |
平坦区侦测节点2阀值。 |
FlatThre3 |
[0, 4095] |
224 |
平坦区侦测节点3阀值。 |
FlatThre4 |
[0, 4095] |
256 |
平坦区侦测节点4阀值。 |
Strength[16] |
[0, 255] |
64 |
G通道平衡全局强度。 |
5.3.1.3. 调试步骤¶
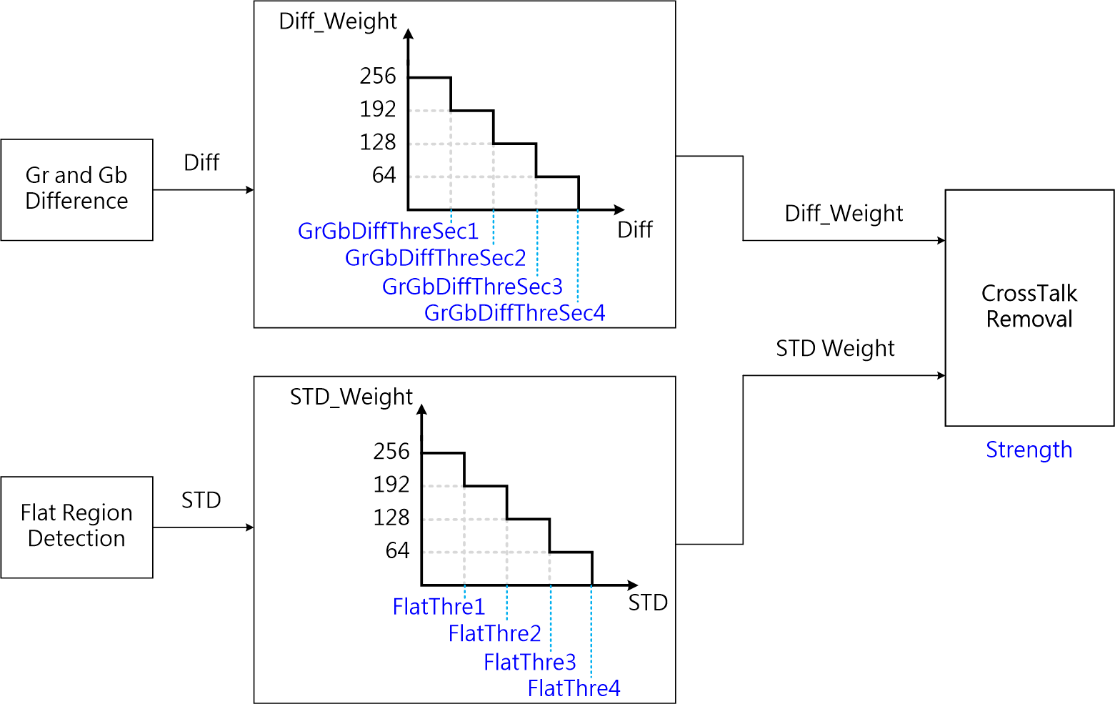
图 5.8 CrossTalk Removal处理流程图及关键参数¶
步骤1. 藉由调整 GrGbDiffThreSec1 ~ GrGbDiffThreSec4 ,当 GrGbDiffThreSec1 的值愈大,代表整体的处理的强度愈强,而 GrGbDiffThreSec2 - GrGbDiffThreSec4 来决定差值距离多远,强度减弱的程度。
步骤2. 藉由调整 FlatThre1 ~ FlatThre4 来决定图像边缘的处理强度,当 FlatThre1 的值愈大,边缘被处理的强度愈强,导致模糊,反之, FlatThre1 愈小,边缘会较为清晰。
步骤3. Strength 则代表图像整体的处理强度,值愈大,强度愈强;反之,值若是设定太小,会残留CrossTalk的格状噪声。
—-结束
5.4. Mesh Lens Shading Correction (MLSC)¶
5.4.1. MLSC标定方法¶
通过研究发现,在 Lens Shading 现象中,目标点的亮度衰减趋势符合余弦四次方定律。对于同一个镜头模组,其成像亮度只会随着成像点和光轴之间的成像角度变化而变化。并且其变化趋势为:与成像角度的余弦值的四次方成正比,正比系数通过镜头的透镜直径以及焦距确定。因此对于同一镜头模组,其标定结果需要满足以下两个条件:其一,标定结果可以有效反应出亮度衰减趋势;其二,标定结果可以用来恢复图像区域中所有目标点的亮度。因此本模块的标定结果需要使用 Mesh 的网格方式进行储存。同时需要注意的是,由于不同光源或者不同色温下光的频谱不同,加上 IR-cut Filter的影响,所以即使是同一镜头模组,其在不同光源下的 Color Shading 特征曲线亦不相同,因此为满足在不同光源或色温下的 Color Shading 的校正要求,需要在不同光源或色温下对 MLSC 进行校正。
由于 Color Shading 的影响,对于某些 Color Shading 现象比较严重的镜头或者 sensor,在做 AWB 标定之前需要对 AWB 的标定采集序列进行 MLSC 校正,以校正结果作为AWB 标定算法的输入才能得到准确的 AWB 标定结果。
5.4.1.1. 环境及相关器材准备¶
MLSC 之标定,多重光源的灰度图像为必要前置准备。明确之采集要求如下列:
MLSC 模块的标定序列采集对象要求必须是亮度分布平坦且均匀的光源,同时采集对象必须保持平滑无纹理。理想情况下应采用辉度箱、 积分球、 DNP 灯箱进行采集, 其他可以作为 MLSC 标定序列采集对象的场景有:灯箱灰内壁(无明显划痕或污迹)、透过毛玻璃而达到均匀分布的光源。如果条件所限,也可以是任意能达到亮度均匀分布的灰度平面(类似白墙), 但是标定的准确程度可能会受到影响。
如果采集对象为灯箱灰内壁,由于灯箱光源分布在内壁上有一定可能性分布不均匀,故最好保持镜头对准光源中心处,并尽量保证镜头捕获区域光源分布平坦。
采集序列格式为 RAW 格式,只需 1 帧即可,采集过程中,光源照度在 400 lux 左右, 镜头中心亮度需保持为最大值(255)的 70%,并且使用需要标定的镜头。
对于需要在不同光源下使用的场景,需要在不同光源下进行标定, 常用的光源有TL84、 CWF、 A、 D65、 D50 等,请根据使用需求选择光源进行标定。
对于不同镜头模组,需要进行重复标定。
实际的准备步骤如下:
步骤1. 将镜头对准目标区域,并保证环境不被干扰。
步骤2. 调节光源亮度,使得镜头中心亮度平均值为最大值的 70%。
步骤3. 使用 CviPQTool Capture Tool 进行 Raw 数据的采集,只需 1 帧即可。
步骤4. 更换光源,重复上述步骤。
—-结束
采集后的 MLSC 标定序列如 图 5.9 所示:
图 5.9 MLSC 标定序列图像¶
5.4.1.2. MLSC标定工具界面¶
将 ISP 标定工具的主功能标签页切换到 MLSC,即可看到 MLSC 标定的界面,如 图 5.10 所示。
MLSC 标定工具主要可以分为三个部分:
控制区:工具进行标定的主要功能 (红色框选区域)。
显示区:显示输入图像以及 MLSC 标定后的输出图像 (蓝色框选区域)。
列表区:打开的输入图像均会在此处显示,并提供下发标定结果至板端的功能,即MLSC页签左下方区块 (绿色框选区域)。
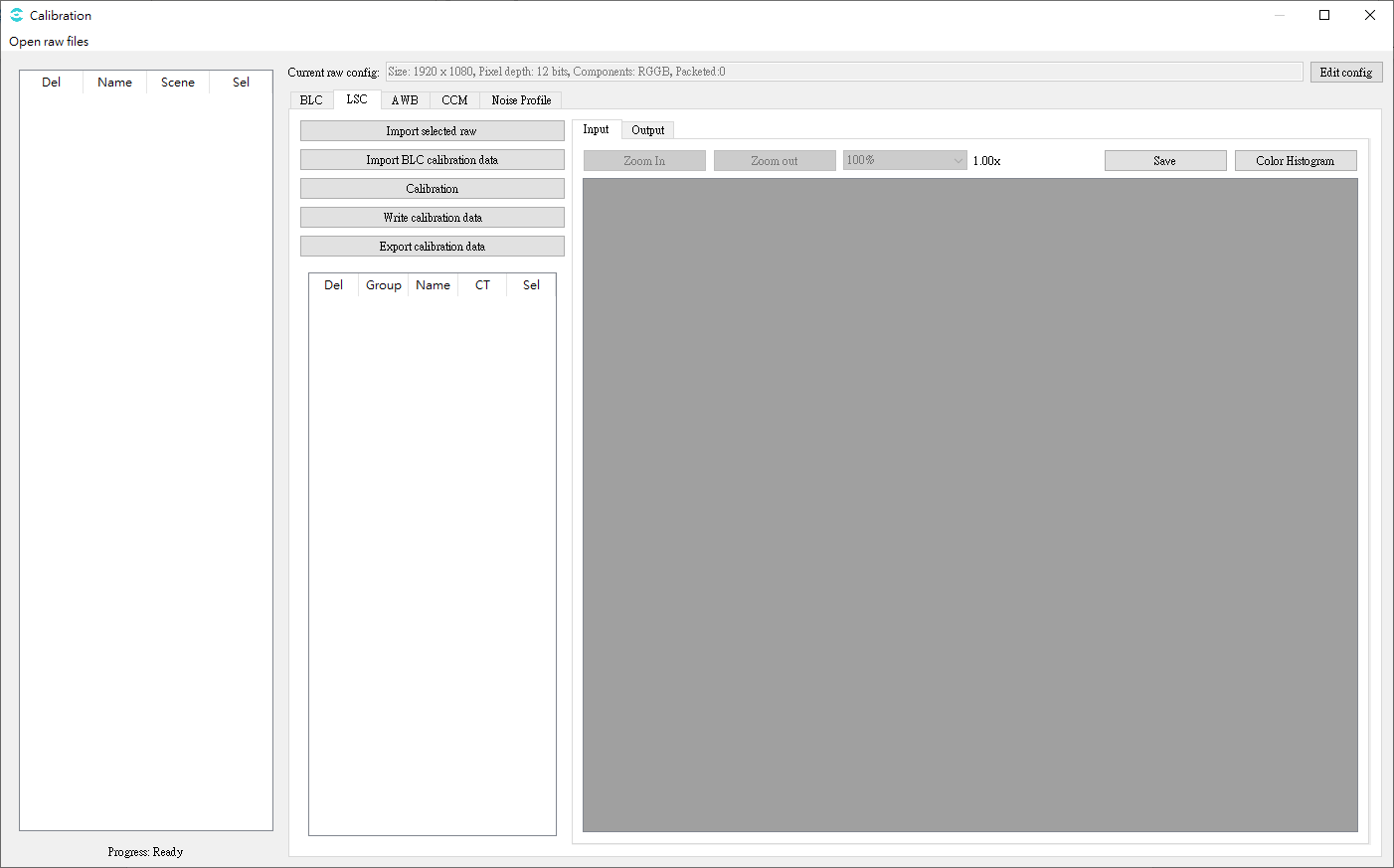
图 5.10 MLSC标定工具界面示意图¶
5.4.1.3. MLSC标定步骤¶
MLSC之一般标定步骤如下:
在左上方选单Open raw files可以导入RAW图像。左侧将显示被导入的档案,再点选Sel栏之核选格,即可在LSC页签点击 “Import selected raw” 来导入选定之RAW图像。
按压按钮“Calibrate”以进行 MLSC 之标定。MLSC之标定可支持多色温,最多可支持七组MLSC标定表。
5.4.2. MLSC调试方法¶
5.4.2.1. 功能描述¶
LSC即为Lens shading correction, 其主要就是修正边角较暗的地方。在处理器中 LSC 算法使用网格方法对图像先做标定,然后矫正,算法会将Bayer 上的域画面划分成 37×37 个子区块。Bayer域四个通道由三组不同的RGB增益数组来做计算。当标定MLSC组数为复数组时,则会根据当前的色温选出邻近的两色温之MLSC标定表进行内插,产生对应当前色温的MLSC增益。标定的组数则由 LscGainLutSize 参数定义之。
5.4.2.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
MLSC模块使能: 0:关闭; 1:开启。 |
OpType |
[0, 1] |
0 |
MLSC工作类型。 0: 自动模式 (OP_TYPE_AUTO); 1: 手动模式(OP_TYPE_MANUAL)。 |
MeshStr |
[0, 4095] |
4095 |
MLSC 全局强度 |
LscGainLutSize |
[1, 7] |
1 |
标定的MLSC组数,最多可支持七组标定数据 |
LscGinaLut[n].ColorTemp |
[500 ,30000] |
第n组标定数据对应的色温 |
|
LscGinaLut[n].RGain |
[0, 4095] |
第n组标定数据对应的R通道增益表 |
|
LscGinaLut[n].GGain |
[0, 4095] |
第n组标定数据对应的G通道增益表 |
|
LscGinaLut[n].BGain |
[0, 4095] |
第n组标定数据对应的B通道增益表 |
5.4.2.3. 调试步骤¶
在做参数调试之前,请先确认 表 5.5 所列的模块已经完成调试,且关键参数的默认值依照 表 5.4 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
MLSC具体操作接口如下,MeshShading的方框聚集了所有MLSC的选项,调整完成后即完成调试步骤。
5.5. Radial Shading Correction (RLSC)¶
5.5.1. RLSC标定方法¶
Lens shading 系因球面状镜头折射率不同所导致接收影像成同心圆状衰减,越靠近镜头中心位置的影像亮度衰减较少,而越远离镜头中心位置的影像亮度衰减越强。Radial Shading Correction 的矫正方式提供了基于同心圆的暗角增益来处理由于镜头光学折射不均匀导致的画面暗角现象。Radial shading correction 仅支持用于产生AE, AWB, AF 统计值上的影像修正。
Radial shading correction标定方是同MLSC,对于同一镜头模组,其标定结果需要满足以下两个条件:其一,标定结果可以有效反应出亮度衰减趋势;其二,标定结果可以用来恢复图像区域中所有目标点的亮度。同时需要注意的是,由于不同光源或者不同色温下光的频谱不同,加上 IR-cut Filter 的影响, 所以即使是同一镜头模组,其在不同光源下的 Color Shading 特征曲线亦不相同,因此为满足在不同光源或色温下的 Color Shading 的校正要求,需要在不同光源或色温下对 RLSC 进行校正。
由于 Color Shading 的影响,对于某些 Color Shading 现象比较严重的镜头或者 sensor,在做 AWB 标定之前需要对 AWB 的标定采集序列进行校正,以校正结果作为AWB 标定算法的输入才能得到准确的 AWB 标定结果。
5.5.1.1. 环境及相关器材准备¶
RLSC 之标定影像可与MLSC之标定影像共享。多重光源的灰度图像为必要前置准备。明确之采集要求如下列:
RLSC 模块的标定序列采集对象要求必须是亮度分布平坦且均匀的光源,同时采集对象必须保持平滑无纹理。理想情况下应采用辉度箱、 积分球、 DNP 灯箱进行采集, 其他可以作为 RLSC 标定序列采集对象的场景有:灯箱灰内壁(无明显划痕或污迹)、透过毛玻璃而达到均匀分布的光源。如果条件所限,也可以是任意能达到亮度均匀分布的灰度平面(类似白墙), 但是标定的准确程度可能会受到影响。
如果采集对象为灯箱灰内壁,由于灯箱光源分布在内壁上有一定可能性分布不均匀,故最好保持镜头对准光源中心处,并尽量保证镜头捕获区域光源分布平坦。
采集序列格式为 RAW 格式,只需 1 帧即可,采集过程中,光源照度在 400 lux 左右, 镜头中心亮度需保持为最大值(255)的 70%,并且使用需要标定的镜头。
对于需要在不同光源下使用的场景,需要在不同光源下进行标定, 常用的光源有TL84、 CWF、 A、 D65、 D50 等,请根据使用需求选择光源进行标定。
对于不同镜头模组,需要进行重复标定。
实际的准备步骤如下:
步骤1. 将镜头对准目标区域,并保证环境离院不被干扰。
步骤2. 调节光源亮度,使得镜头中心亮度平均值为最大值的 70%。
步骤3. 使用 CviPQTool Capture Tool 进行 Raw 数据的采集,只需 1 帧即可。
步骤4. 更换光源,重复上述步骤。
—-结束
采集后的 RLSC 标定序列如 图 5.11 所示:
图 5.11 RLSC 标定序列图像¶
5.5.1.2. RLSC标定工具界面¶
RLSC 标定的界面与MLSC标定界面公用,如 图 5.10 所示。
RLSC 标定工具主要可以分为三个部分:
控制区:工具进行标定的主要功能 (红色框选区域)。
显示区:显示输入图像以及 RLSC 标定后的输出图像 (蓝色框选区域)。
列表区:打开的输入图像均会在此处显示,并提供下发标定结果至板端的功能,即LSC页签左下方区块 (绿色框选区域)。
5.5.1.3. RLSC标定步骤¶
RLSC之一般标定步骤如下:
在左上方选单Open raw files可以导入RAW图像。左侧将显示被导入的档案,再点选Sel栏之核选格,即可在LSC页签点击Import selected raw来导入选定之RAW图像。
按压按钮“Calibrate”以进行 RLSC 之标定。RLSC之标定可支持多色温,最多可支持七组RLSC标定表。
5.5.2. RLSC调试方法¶
5.5.2.1. 功能描述¶
Radial Lens Shading 原理是以镜头为中心参考周围像素的坐标去对像素做处理,因此可以用来补足镜头同心圆状亮度衰减的缺失。
5.5.2.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0,1] |
0 |
LSC 功能使能。 0: 关闭。 1: 始能。 |
RadiusStr |
[0, 4095] |
0 |
LSC 补偿强度 |
RadiusIRStr |
[0, 4095] |
0 |
LSC IR 补偿强度 |
Size |
[1,7] |
0 |
色温自适应LSC补偿增益表数量 |
ColorTemperature[7] |
[0,6 5535] |
0 |
色温自适应LSC补偿增益表所对应之色温 |
RadiusShadingRGain[7][32] |
[0, 4095] |
5 12 |
LSC Radius形式红色补偿增益表 |
RadiusShadingGGain[7][32] |
[0, 4095] |
5 12 |
LSC Radius形式绿色补偿增益表 |
RadiusShadingBGain[7][32] |
[0, 4095] |
5 12 |
LSC Radius形式蓝色补偿增益表 |
RadiusShadingIRGain[7][32] |
[0, 4095] |
5 12 |
LSC Radius形式IR补偿增益表 |
5.5.2.3. 调试步骤¶
在做参数调试之前,请先确认 表 5.7 所列的模块已经完成调试,且关键参数的默认值依照 表 5.6 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
RLSC具体操作接口如下,MeshShading的方框聚集了所有RLSC的选项,调整完成后即完成调试步骤。
5.6. White Balance¶
5.6.1. AWB标定方法¶
根据 sensor 在数个标准光源下的白点特征 (R/G,B/G),计算最佳普朗克色温拟合曲线。
5.6.1.1. 环境及相关器材准备¶
需要标定的镜头与Sensor、标准 18% 反射灰卡 (如 图 5.12 所示)。

图 5.12 标准18%反射灰卡¶
步骤1. 在照度 600 lux 的光源下(左右两测的光源需均匀, 光源与色卡的夹角在 25°- 45°),在光源类型的选择上,请尽量满足高,中、低色温至少各有一组。推荐使用D65(6500K)或D75(7500K )、TL84(4000K )和 A (2800K )三组光源。
步骤2. 采集Raw时请尽量使灰卡画面占据70%以上的画面内容,并确认 Raw 的亮度符合预期,G分量亮度在饱和值的0.36倍左右(若是12 bits raw,建议G值在 1274 ~ 1674 ),采集帧数1帧即可,采集时需要记录实际环境色温。
步骤3. 由于镜头Shading 会影响 AWB 的标定结果,为确保 AWB 标定结果准确,请将采集下来的Raw进行Shading标定后再进行AWB标定。
—-结束
5.6.1.2. AWB标定工具界面¶
将标定工具的主功能卷标页切换到AWB,即可看到 AWB标定的界面,如 图 5.13 所示
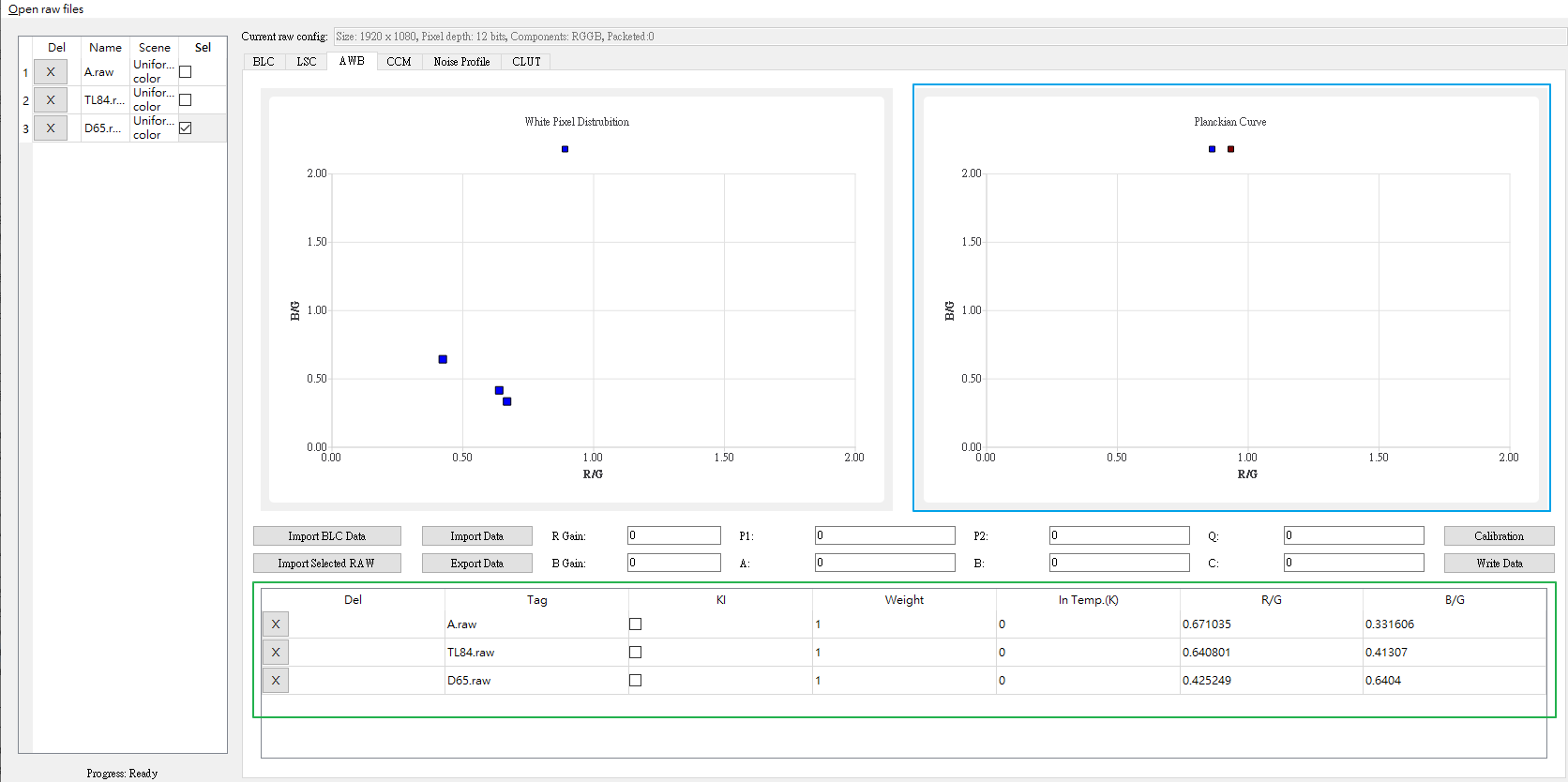
图 5.13 AWB标定工具界面示意图¶
5.6.1.3. AWB标定步骤¶
步骤1. Import BLC Data , 校正AWB时须要有正确的BLC 值。
步骤2. 点击“Open raw file” 开启并选取欲标定之 raw 档, Raw Scene 选项请选择 uniform color。请选取正确的RAW Format避免校正出错误的AWB色温曲线。
步骤3. 勾选 欲标定之 raw 檔 , 点击“Import select raw”,汇入此 raw 档。
步骤4. 重复步骤2~3 , 至少要有三个色温的RAW檔。
步骤5. 在绿色框区域输入每个RAW文件的色温(In Temp.(K))
步骤6. 在绿色框区域勾选3个KI (关键色温)
步骤7. 点击“Calibration”,进行 AWB 标定。
步骤8. 蓝色框区域会出现标定的WB曲线,可以利用Weight 权重来做曲线的调整。
步骤9. 确认无误后,按“Write Data”,写入 AWB 标定资料。
步骤10. 按“Export Data”,汇出 AWB 标定档。
步骤11. 注意,请确认色温越高,R/G的值会越低,B/G的值会越高,如不符合请重新确认RAW的拍摄与格式是否正确。
可透过 WB Attr页面的 AWB Calibration Data确认
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
ColorTemp[0~2] |
[0, 30000] |
0 |
AWB校正的三组色温(低到高) |
AvgRgain[0~2] |
[0, 4095] |
0 |
AWB校正的Rgain |
AvgBgain[0~2] |
[0,4095] |
0 |
AWB校正的Bgain |
5.6.2. AWB调试方法¶
5.6.2.1. 功能描述¶
同一物体在不同光源照射下会呈现出不同的颜色,在低色温光源下,白色物体偏红,在高色温光源下,白色物体偏蓝。人眼可根据大脑的记忆判断,识别物体的真实颜色。AWB 算法的功能是让白色在不同的光源下, 不受现场环境光源的影响还原成原本的白色。AWB 算法的基本原理是,根据场景内灰色物体的颜色信息,计算R,G, B颜色通道的增益,乘以R信道及B信道的增益后,使得 RGB 三个通道达到平衡。AWB 的增益是全局性的,因此,在有多种光源的混合光源场景下,不能达到所有灰色区域的RGB三通道平衡。
5.6.2.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Bypass |
[0, 1] |
0 |
ByPass 为 true 时 , WB其它参数设置不生效 , RGB通道增益系数固定为 1024(一倍增益)。 |
OpType |
[0, 1] |
0 |
手动白平衡与自动白平衡模式切换。 |
AlgType |
[0, 1] |
0 |
AWB 算法类别 0:AWB,1:AWB_SPEC |
AWBRunInterval |
[1, 255] |
6 |
白平衡模块工作频率,建议使用默认值6,避免运算量过大。 |
RGain |
[1, 16383] |
10 24 |
手动白平衡模式 R 信道增益系数,一倍增益为1024。 |
GGain |
[1, 16383] |
1024 |
手动白平衡模式 G 信道增益系数,一倍增益为1024。 |
BGain |
[1, 16383] |
1024 |
手动白平衡模式 B 信道增益系数,一倍增益为1024。 |
Enable |
[0, 1] |
1 |
自动白平衡模式使能。 |
RefColorTemp |
[0, 65535] |
5000 |
静态白平衡系数,由AWB标定工具给出。 |
Static WB |
[0, 4096] |
1024 |
静态白平衡系数,由AWB标定工具给出。 |
CurvePara |
[-2147483648, 2147483647] |
1 |
CurvePara[0-2] 普朗克曲线系数,由AWB标定工具给出。普朗克曲线描绘白色块在不同色温的标准光源下的颜色表现。CurvePara[3-5] 色温曲线系数,由AWB标定工具给出。色温曲线描绘白色块的颜色表现与色温的对应关系。 |
AWB.AlgType |
[0, 1] |
1 |
AWB算法类别选择,0:AWB_ALG_LOWCOST, 1:AWB_ALG_ADVANCE两种。当使用AWB_ALG_LOWCOST时,A WBAttrEx页面的功能将不生效。 |
RGStrengthBGStrength |
[0, 255] |
128 |
AWB 校正强度,一般情况不建议调整。推荐 RGStrength = BGStrength,且设置值<=0x80。 RGStren gth=0x80时,白色恢复为白色; RGS trength>0x80时,白色与光源反向,低色温偏蓝,高色温偏红; RGS trength<0x80时,白色与光源同向,低色温偏红,高色温偏蓝。 新的调整模式(BGStrength=0,即可进入此模式): 当RGStrength=0x80时,不做调整 当RGStrength<0x80且趋向于0时,越来越偏暖色调 当RGStrength>0x80且趋向于255时,越来越偏冷色调 |
Speed |
[0, 4095] |
2 56 |
AWB 收敛速度,值越大,AWB收敛越快,每帧波动幅度较大,值越小,切换光源时,AWB收敛速度较慢,画面稳定性高。 |
ZoneSel |
[0, 255] |
32 |
参数为0或255时,采用近似灰世界的白平衡算法,其他值则为进行分类筛选,提升精度。 |
HighColorTemp |
[0, 65535] |
8000 |
AWB 支持的色温上限,推荐取值在[8000,15000]。 色温上限越大,蓝色物体对AWB的干扰越大。 |
LowColorTemp |
[0, 65535] |
2500 |
AWB 支持的色温下限,推荐取值在[1500,2500]。 色温下限越小,橙色、红色物体对AWB的干扰越大。 |
CTLimit.Enable |
[0, 1] |
1 |
自平衡的增益范围限制开关。 |
CTLimit.OpType |
[0, 1] |
0 |
自动或手动设定白平衡的增益范围。 |
CTLimit.HighRgLimit |
[0, 16383] |
2500 |
手动模式下高色温下的最大R增益。 |
CTLimit.HighBgLimit |
[0, 16383] |
512 |
手动模式下高色温下的最小B增益。 |
CTLimit.LowRgLimit |
[0, 16383] |
512 |
手动模式下低色温下的最小R增益。 |
CTLimit.LowBgLimit |
[0, 16383] |
4096 |
手动模式下低色温下的最大B增益。 |
ShiftLimitEn |
[0, 1] |
0 |
AWB超过类白点范围的增益映像回白点范围的开关。 |
ShiftLimit |
[0, 4095] |
240 |
以普朗克曲线为中心点,ShiftLimit为上,下带宽确定AWB支持的白区范围。 ShiftLimit[0],ShiftLimit[1]为1500~4000K的白区下,上带宽 ShiftLimit[2],ShiftLimit[3]为4001~4800K的白区下,上带宽 ShiftLimit[4],ShiftLimit[5]为4801~6000K的白区下,上带宽 ShiftLimit[6],ShiftLimit[7] 为6001~15000K的白区下,上带宽 可视不同的高,低色温灯源设定不同大小的带宽,取值越大,白区的带宽越广,对特殊光源的支持越广,影响特定场景下AWB精度。 |
GainNormEn |
[0, 1] |
1 |
对 RGB 通道增益进行限制,可以改善低色温、低照度场景的信噪比,预设开启。 |
NaturalCastEn |
[0, 1] |
0 |
低色温下AWB风格喜好开关,低色温下会保留光源色。预设关闭。 |
CbCrTrack.Enable |
[0, 1] |
0 |
AWB统计范围与ISO的连动参数。 |
CbCrTrack.CrMax |
[0, 16383] |
1100 |
不同ISO下R/G的最大值。 |
CbCrTrack.CrMin |
[0, 16383] |
400 |
不同ISO下R/G的最小值。 |
CbCrTrack.CbMax |
[0, 16383] |
750 |
不同ISO下B/G的最大值。 |
CbCrTrack.CbMin |
[0, 16383] |
256 |
不同ISO下B/G的最小值。 |
LumaHist.Enable |
[0, 1] |
1 |
不同亮度是否开启权重,预设开启。 |
LumaHist.OpType |
[0, 1] |
0 |
自动模式:AWB自动分配权重。手动模式:用户可自行设定亮度分类与权重。 |
LumaHist.HistThres |
[0, 255] |
16 |
亮度分类的阈值(手动模式下有效)。 HistThresh[0] 固定为0,HistThresh[5]固定为255. HistThresh [i+1]必须大于HistThresh[i]。 |
LumaHist.HistWt |
[0, 512] |
32 |
亮度分类的权重(手动模式下有效)。 |
AWBZoneWtEn |
[0, 1] |
0 |
画面区域权重开关。建议在鱼眼镜头或行车纪录器开启,避免其他四周区域的干扰。 |
ZoneWt |
[0, 255] |
8 |
32x32画面权重。可视情况将画面的中心范围调高权重。 |
Tolerance |
[0, 255] |
2 |
AWB调整的偏差范围,误差在此范围内时,AWB不做调整。 |
ZoneRadius |
[0, 255] |
16 |
AWB统计值分区的大小。该值越小,AWB精度越高,但会降低 AWB算法稳定性。 |
CurveLLimit |
[0, 1024] |
320 |
AWB色温曲线的左边界限(R/G,B/G),如AWB分析图的左下红色框线。 |
CurveRLimit |
[512, 16383] |
768 |
AWB色温曲线的右边界限(R/G,B/G),如AWB分析图的右上红色框线。 |
ExtraLightEn |
[0, 1] |
0 |
是否开启独立光源。 |
LightInfo.WhiteRgain |
[0, 16383] |
1024 |
特殊光源点的R通道增益。 |
LightInfo.WhiteBgain |
[0, 16383] |
1024 |
特殊光源点的B通道增益。 |
LightInfo.ExpQuant |
[0, 4095] |
1024 |
根据外在亮度做判断。 ExpQuant 为开启的亮度限制值,例如 ExpQuant = 6, 表示LV6以下开启此WB光源点(一般夜景为LV6以下) ExpQuant =106 表示LV6以上开启 ExpQuant =112 表示LV12以上开启(LV12一般为户外) |
LightInfo.Status |
[0, 2] |
0 |
特殊光源点的种类, 0:不作动 1:加入光源点 2:删除光源点附近的计算。 |
LightInfo.Radius |
[0, 255] |
8 |
特殊光源点的区域大小。 |
InOrOut.Enable |
[0, 1] |
1 |
AWB对场景做室内外判断的参数。 |
InOrOut.OpType |
[0, 1] |
0 |
判断室内室外(自动或手动)。 |
InOrOut.OutdoorStatus |
[0, 1] |
0 |
室内或室外模式(手动模式下)。 |
InOrOut.OutThresh |
[0, 20] |
14 |
判定室内室外的阈值,亮度小于时,则判定为室内,户外LV大多超过15。 |
InOrOut.LowStart |
[0, 65535] |
5000 |
将低色温的权重拉低,低色温区的起始点,建议为5000K。 |
InOrOut.LowStop |
[0, 65535] |
4500 |
将低色温的权重拉低,低色温区的终止点,建议为4500K。 |
InOrOut.HighStart |
[0, 65535] |
6500 |
将高色温的权重拉低,高色温区的起始点,建议为6500K。 |
InOrOut.HighStop |
[0, 65535] |
8000 |
将高色温的权重拉低,高色温区的终止点,建议为8000K。 |
InOrOut.bGreenEnhanceEn |
[0, 1] |
1 |
在绿色植物场景下,对绿色通道增加的开关。 |
InOrOut.OutShiftLimit |
[0, 255] |
32 |
当判定为户外场景时,AWB算法的白点范围限制。 |
MultiLightSourceEn |
[0, 1] |
1 |
AWB检测当前场景是否为混合光源,来调整饱和度或CCM。 |
MultiLSType |
[0, 1] |
0 |
调整饱和度或是CCM。 |
MultiLSScaler |
[0, 256] |
256 |
当混合光源下调整饱和度或CCM的强度。 |
MultiCTBin |
[0, 65535] |
5000 |
色温分段参数,须为递增序列。 |
MultiCTWt |
[0, 1024] |
256 |
色温分段权重。 |
FineTunEn |
[0, 1] |
1 |
AWB特殊色检测开关,例如肤色。 |
FineTunStrength |
[0, 255] |
128 |
肤色、蓝色等特殊色检测的强度。 |
stSkin.u8Mode |
[0, 1] |
0 |
肤色检测开关 |
stSkin.u16RgainDiff |
[0, 65535] |
0 |
肤色Rgain偏移值 |
stSkin.u16BgainDiff |
[0, 65535] |
0 |
肤色Bgain偏移值 |
stSkin.u8Radius |
[0, 255] |
0 |
肤色区域大小 |
stSky.u8Mode |
[0, 2] 0: 不对范围内点进行特殊处理 1:将选中范围内的点移除,即不纳入计算 2:映射基点Radius范围内Rgain和Bgain为MapRgain和MapBgain |
0 |
灰点处理模式 |
stSky.u8ThrLv |
[0, 255] |
0 |
亮度阈值,待处理点需大于当前Lv |
stSky.u16Rgain |
[0, 65535] |
0 |
待处理点的基点R gain |
stSky.u16Bgain |
[0, 65535] |
0 |
待处理点的基点B gain |
stSky.u16MapRgain |
[0, 65535] |
0 |
基点R gain Radius范围内的点映射至当前Rgain |
stSky.u16MapBgain |
[0, 65535] |
0 |
基点B gain Radius范围内的点映射至当前Bgain |
stSky.u8Radius |
[0, 255] |
0 |
以R gain、B gain为基点的区域大小 |
stCtLv.bEnable |
[0, 1] |
0 |
根据亮度计算色温权重开关 |
stCtLv.au16MultiCTBin |
[0, 65535] |
2300, 2800, 3500, 4800, 5500, 6300, 7000, 8500 |
色温分段参数,须为递增序列 |
stCtLv.s8ThrLv |
[-128, 127] |
1, 5, 9, 13 |
亮度分段阈值 |
stCtLv.au16MultiCTWt |
[0, 1024] |
64, 256, 256, 256, 256, 512, 512, 256 |
色温分段权重 |
stShiftLv.u8LowLvMode |
[0, 1] |
1 |
低亮场景调节有效范围开关 |
stShiftLv.u16LowLvCT |
[0x0,0xff] 0xff 为全区域调整 1:低色温标定线下方区域 2:低色温标定线上方区域 4:中色温1标定线下方区域 8:中色温1标定线上方区域 16:中色温2标定线下方区域 32:中色温2标定线上方区域 64:高色温标定线下方区域 128:高色温标定线上方区域 |
1, 192 |
低亮度调整距离标定线的有效范围的区域 |
stShiftLv.u16LowLvThr |
[0, 65535] |
15, 15 |
低亮度调整有效范围的亮度阈值 |
stShiftLv.u16LowLvRatio |
[0, 65535] |
150, 30 |
低亮度有效范围调节比例(ratio/100) |
stShiftLv.u8HighLvMode |
[0, 1] |
1 |
高亮场景调节有效范围开关 |
stShiftLv.u16HighLvCT |
[0x0,0xff] 0xff 为全区域调整 1:低色温标定线下方区域 2:低色温标定线上方区域 4:中色温1标定线下方区域 8:中色温1标定线上方区域 16:中色温2标定线下方区域 32:中色温2标定线上方区域 64:高色温标定线下方区域 128:高色温标定线上方区域 |
3, 0 |
高亮度调整距离标定线的有效范围的区域 |
stShiftLv.u16HighLvThr |
[0, 65535] |
15, 15 |
高亮度调整有效范围的亮度阈值 |
stShiftLv.u16HighLvRatio |
[0, 65535] |
300, 100 |
高亮度有效范围调节比例(ratio/100) |
stRegion.u16Region1 |
[0, 65535] |
3900 |
Low、Mid1色温区域分界点 |
stRegion.u16Region2 |
[0, 65535] |
4300 |
Mid1、Mid2色温区域分界点 |
stRegion.u16Region3 |
[0, 65535] |
6600 |
Mid2、High色温区域分界点 |
adjBgainMode |
[0, 255] 1:低色温区域 4:中色温2区域 8:高色温区域 |
0 |
微调参与白平衡B gain值计算点的所在区域 参数: |
可透过 WB Info 页面, 了解当前的AWB信息
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Rgain |
[0, 16383] |
0 |
AWB 当前 frame 的R通道增益系数 |
Ggain |
[0, 16383] |
0 |
AWB 当前 frame 的G通道增益系数。 |
Bgain |
[0, 16383] |
0 |
AWB 当前 frame 的B通道增益系数。 |
ColorTemp |
[0, 65535] |
0 |
AWB 评估当前环境的色温。 |
5.6.2.3. 调试步骤¶
在标定完成后,测试标准光源下的AWB精度,确认图像颜色是否正确。若出现偏色,则需要检查以下参数配置是否合理。
步骤1. 检测色温是否在[LowColorTemp、HighColorTemp]范围内,如果不在,调整色温上下限。
步骤2. 打开 Tuning Tools 的AWB分析接口(Extra Utilities->3A Analyser ->AWB),观察白色点是否在当前参数划定的白色区域内,如果不在,调整参数 ShiftLimit,扩大白色区域,将其概括进来。

在AWB分析图中,两条绿色线为目前AWB色温曲线的范围,在绿线中间的为AWB色温曲线(由自动标定时产生),左下与右上的两个红框为CurveLLimit,CurveRLimit。蓝色的点为AWB画面分隔为32x32时,每个分区的R/G,B/G。当在标准的校正灯源下,大部分的蓝色点都会落在两条绿色色温曲线范围之中。

步骤3. 若镜头有严重双色问题,或是特殊应用可以将AWBZoneWtEn 权重打开,并填入相对应的权重大小。
步骤4. 若有特殊的光源需要加入或排除,ExtraLightEn打开后共有四组光源可以设定,设置好相对的Rgain,Bgain及Radius,Staus(设置为1时,会增加此光源点,以改善该光源下的AWB,设置为2时,删除该光源,可以用来减少例如蓝天,肤色的干扰)后即可在AWB分析图内看到所加入或排除的圆圈。
步骤5. 户外色温权重参数要求: 四个参数的取值范围要求:LowStop < LowStart < HighStart < HighStop。以下图为例
LowStop为3800K,LowStart为5000K,HighStart为6200K, HighStop为7200K,一般权重为32,室外色温最高权重为256

步骤6. 在混合光源场景希望用色温权重来改善AWB,不做饱和度或CCM调整,可以将MultiLightSourceEn打开,MultiLSType选择饱和度(SAT),MultiLSScaler设为256。
步骤7. FineTunEn 打开,AWB 会自动检测肤色等特殊色,改善肤色场景 AWB 表现,提高 AWB 精度。但可能在低色温光源下发生误判,导致图像轻微偏黄。FineTunStrength 调整肤色检测的强度,取值越大,肤色场景 AWB 表现越好,但误判时的副作用越明显。推荐采用默认值 128。
—-结束
5.7. BNR¶
5.7.1. BNR标定方法¶
BNR (Bayer-domain Noise Reduction) 实现Bayer域的噪声抑制。
5.7.1.1. 环境及相关器材准备¶
步骤1. 准备用来标定的24色卡,如 图 5.14 所示,以及标定的镜头、Sensor和将灯箱设定为D65光源。

图 5.14 标准24色卡¶
步骤2. 将色卡放置在灯箱里面,灯箱的照度设定在400 Lux,照度必须均匀。将镜头固定后,接着调整镜头与24色卡的距离,直到色卡覆盖的面积约为屏幕的 1/2 。
步骤3. 在相同ISO下,抓取20~30帧左右的raw,并存放在同一个文件夹里。
步骤4. 将镜头的光圈调节到最大,然后用户设定要量测ISO值,藉由调节曝光时间,使得24色卡的左下方色块 (Block 19) 的亮度达到最大值的80% (若图像位宽为12位,则Block 19的亮度约为3276左右)。
步骤5. 重复步骤3-4,直到获得所有需要的ISO范围。
注意:
在整个拍摄过程中,请不要触碰色卡和镜头或是在拍摄场景附近走动,以免造成光影的影响,导致拍摄的 raw 光线不均匀等问题。
5.7.1.2. BNR标定工具界面¶
采集图像后,将 ISP 标定工具的主功能标签页切换到 BNR,即可看到 BNR标定的界面,如 图 5.15 所示。
BNR标定工具主要可以分为两个部分:
控制区:进行BNR标定时的主要功能 (红色框选区域)。
显示区:显示输入图像 (蓝色框选区域)。
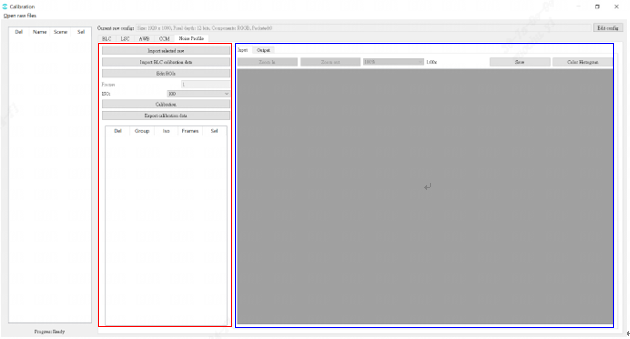
图 5.15 BNR 标定工具界面¶
5.7.1.3. BNR标定步骤¶
步骤1. 在标定工具左上方Open raw files选择24色卡的Raw图档,然后在下拉选单使用24 Colors。
步骤2. 点选并导入24色卡的RAW图像。
步骤3. 框选24色卡的24个色块。
步骤4. 点击BLC Calibration按钮。
步骤5. 点击LSC Calibration按钮。
步骤6. 点击BNR Calibration按钮进行标定,获得BNR标定结果。
5.7.2. BNR调试方法¶
5.7.2.1. 功能描述¶
BNR主要是在Bayer domain进行空域去噪处理。根据不同的sensor建立符合噪声特性的去噪模型。经过BNR适当地去噪处理后,使得最后的图像结果看起来自然,且避免出现在去噪过程中一些常见的视觉瑕疵,例如虫状噪声和pattern噪声。关键参数的配置提供了调整去噪强度的弹性。在抑制噪声的同时,保留图像边缘、纹理和细节,不改变原始的噪声型态,且对随机噪声有一定的保留,因此能提高图像结果的信噪比和整体均匀度。
5.7.2.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
BNR模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 4] |
0 |
BNR工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
TuningMode |
[0, 15] |
8 |
8 : BNR 图像结果。 11 : 所有边缘检测结果。 12 :垂直边缘检测结果。 13 :水平边缘检测结果。 14 :45°边缘检测结果。 15 :135°边缘检测结果。 |
CoringParamEnable |
[0, 1] |
0 |
0:NpSlope/Np LumaThr/NpLowOffset由程序决定。 1:以上三种参数可人工设置。 |
NoiseSuppressStr |
[0, 255] |
0 |
噪声抑制强度。值越大,亮噪去除强度越大。 |
WindowType |
[0, 11] |
11 |
去噪滤波局域程度。其值越小,作用越局域。 |
VarThr |
[0, 1023] |
512 |
侦测边缘的阈值。值越大,判断为边缘的数量越少。 |
NoiseSuppressStrMode |
[0, 255] |
16 |
去噪强度。值越大,亮噪去除强度越大。 调整diffmap。 |
LumaStr |
[0, 31] |
[0, …, 0] |
根据8阶luma调整去噪强度,值越大去噪越强。根据luma调整diffmap。 |
FilterType |
[0, 255] |
0 |
去噪滤波器强度。值越大,亮噪去除强度越大。 |
DetailSmoothMode |
[0, 1] |
1 |
去噪细节平滑功能使能。 0: 关闭。 1: 使能。 |
NonDirFiltStr |
[0, 31] |
0 |
调节在低频区的去噪强度。值越大,在低频区域去除的噪声越多。 |
VhDirFiltStr |
[0, 31] |
0 |
调节在水平和垂直区的去噪强度。值越大,在水平和垂直边缘去除的噪声越多。 |
AaDirFiltStr |
[0, 31] |
0 |
调节在对角线边缘的去噪强度。值越大 ,在对角线边缘去除的噪声越多。 |
CoringWgtLF |
[0, 256] |
0 |
调节在低频区域的随机噪声强度。值越大,在低频区域保留的噪声越多。 |
CoringWgtHF |
[0, 256] |
0 |
调节在高频区域的随机噪声强度。值越大,在高频区域的保留的噪声越多。 |
NpSlopeB |
[0, 1023] |
1023 |
Noise profile 在B通道的斜率。 |
NpSlopeGb |
[0, 1023] |
1023 |
Noise profile 在Gb通道的斜率。 |
NpSlopeGr |
[0, 1023] |
1023 |
Noise profile 在Gr通道的斜率。 |
NpSlopeR |
[0, 1023] |
1023 |
Noise profile 在R通道的斜率。 |
NpLumaThrB |
[0, 1023] |
16 |
Noise profile 在B通道的亮度阈值。 |
NpLumaThrGb |
[0, 1023] |
16 |
Noise profile 在Gb通道的亮度阈值。 |
NpLumaThrGr |
[0, 1023] |
16 |
Noise profile 在Gr通道的亮度阈值。 |
NpLumaThrR |
[0, 1023] |
16 |
Noise profile 在R通道的亮度阈值。 |
NpLowOffsetB |
[0, 1023] |
0 |
Noise profile 在B通道可允许的最小 noise level。 |
NpLowOffsetGb |
[0, 1023] |
0 |
Noise profile 在Gb通道可允许的最小 noise level。 |
NpLowOffsetGr |
[0, 1023] |
0 |
Noise profile 在Gr通道可允许的最小 noise level。 |
NpLowOffsetR |
[0, 1023] |
0 |
Noise profile 在R通道可允许的最小 noise level。 |
NpHighOffsetB |
[0, 1023] |
1023 |
Noise profile 在B通道可允许的最大 noise level。 |
NpHighOffsetGb |
[0, 1023] |
1023 |
Noise profile 在Gb通道可允许的最大 noise level。 |
NpHighOffsetGr |
[0, 1023] |
1023 |
Noise profile 在Gr通道可允许的最大 noise level。 |
NpHighOffsetR |
[0, 1023] |
1023 |
Noise profile 在R通道可允许的最大 noise level。 |
5.7.2.3. 调试步骤¶
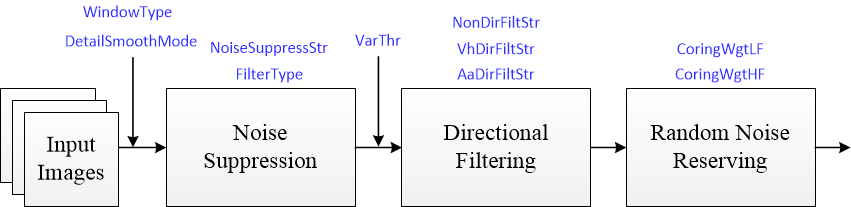
图 5.16 BNR关键参数¶
在做参数调试之前,请先确认 表 5.11 所列的模块已经完成调试,且关键参数的默认值依照 表 5.10 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
3DNR |
Tuned |
Noise Profile |
Set |
步骤1. 调节亮度噪声去噪功能。相关参数包含噪声抑制强度 NoiseSuppressStr 和去噪滤波器强度 FilterType ,参数会随着不同的ISO而有相对应的配置。首先,调节 NoiseSuppressStr ,使其渐渐增大,直到整体图像能在保持完整细节的前提下,使噪声达到最小。接着,适当地增大 FilterType ,并同时配合其他去噪模块来调试。
 调试原则: 尽可能地保持整体图像噪声的均匀性,并且避免出现冲击噪声、虫状噪声和pattern噪声。针对参数 WindowType 和 DetailSmoothMode 的配置,建议先使用默认值。
调试原则: 尽可能地保持整体图像噪声的均匀性,并且避免出现冲击噪声、虫状噪声和pattern噪声。针对参数 WindowType 和 DetailSmoothMode 的配置,建议先使用默认值。
步骤2. 控制 VarThr 来决定图像的低频与高频区域,接着分别调节 NonDirFiltStr 和 VhDirFiltStr/AaDirFiltStr 改变去噪强度。 NonDirFiltStr 越大,低频区域的噪声越少,而 VhDirFiltStr/AaDirFiltSrtr 越大,图像边缘越平顺。
调试原则: 建议 NonDirFiltStr 和 VhDirFiltStr/AaDirFiltStr 设定为相同数值,对全图均匀地去噪。若图像边缘的平顺性已经满足需求,则 NonDirFilter 和 VhDirFiltStr/AaDirFiltStr 设定为0。
步骤3. 根据步骤2得到的图像低频与高频区域,分别通过调节参数 CoringWgtLF 和 CoringWgtHF 保留随机噪声的程度。适当地调高 CoringWgtLF 可改善虫状噪声和pattern噪声,而适当地增大 CoringWgtHF 可增加图像细节感。
调试原则: 建议 CoringWgtLF 和 CoringWgtHF 设定为相同数值,使图像整体的噪声均匀分布。若图像没有出现上述提及的噪声类型, CoringWgtLF 和 CoringWgtHF 设定为0。
—-结束
5.8. Demosaic¶
5.8.1. Demosaic调试方法¶
5.8.1.1. 功能描述¶
Demosaic主要是实现将Bayer图像转成RGB图像。利用当前像素与周围像素之间关系,实现方向插值功能,计算出当前缺失的其他两个分量。
5.8.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
1 |
Demosaic模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 4] |
0 |
Demosaic工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
CoarseEdgeThr |
[0, 4095] |
480 |
边缘粗调侦测阈值。值越小,侦测为边缘的数量越多。建议搭配参数 CoarseStr 调试。 |
CoarseStr |
[0, 4095] |
128 |
边缘粗调强度值。值越小,越偏方向性的处理。反之,越偏无方向性的处理。 |
FineEdgeThr |
[0, 4095] |
400 |
边缘细调侦测阈值。值越小,侦测为边缘的数量越多。建议搭配参数 FineStr 调试。 |
FineStr |
[0, 4095] |
40 |
边缘细调强度值。值越小,越偏方向性的处理 。反之,越偏无方向性的处理。 |
AntiFalseColorEnable |
[0, 1] |
0 |
去伪色彩功能使能。 0: 关闭。 1: 使能。 |
AntiFalseColorStr |
[0, 255] |
255 |
去伪色彩强度,值越大,则降饱和度强度越大。 |
SatGainIn[2] |
[0, 4095] |
[200, 800] |
定义LUT的横轴,即输入像素的饱和度大小。 |
SatGainOut[2] |
[0, 4095] |
[ 4095, 0] |
定义LUT的纵轴,即去伪色彩强度增益。值越大,去伪色彩强度越大。 |
ProtectColorEnable |
[0, 1] |
0 |
自定义色彩的饱和度保护功能使能。 |
ProtectColorGainIn[2] |
[0, 4095] |
[20, 500] |
定义LUT的横轴,即输入像素与保护色相似的程度。 |
ProtectColorGainOut[2] |
[0, 4095] |
[0, 4095] |
定义LUT的纵轴,即去伪色彩强度增益。值越小,去伪色彩强度越小,与输入像素越相似。 |
UserDefineProtectColor1 |
[0, 4095] |
960 |
自定义保护色彩 1。 |
UserDefineProtectColor2 |
[0, 4095] |
560 |
自定义保护色彩2。 |
UserDefineProtectColor3 |
[0, 4095] |
960 |
自定义保护色彩3。 |
EdgeGainIn[2] |
[0, 4095] |
[150, 200] |
定义LUT的横轴,即边缘侦测大小。 |
EdgeGainOut[2] |
[0, 4095] |
[0, 4095] |
定义LUT的纵轴,即去伪色彩强度增益。值越大,去伪色彩强度越大。 |
DetailGainIn[2] |
[0, 4095] |
[10, 150] |
定义LUT的横轴,即细节侦测大小。 |
DetailGainOut[2] |
[1, 4095] |
[0, 4095] |
定义LUT的纵轴,即去伪色彩强度增益。值越大,去伪色彩强度越大。 |
DetailDetectLumaEnable |
[0, 1] |
1 |
根据亮度调整细节侦测强度功能使能。 0: 关闭。 1: 使能。 |
DetailDetectLumaStr |
[0, 4095] |
480 |
根据亮度调整细节侦测强度。建议搭配DetailGain一起调适。 |
DetailSmoothEnable |
[0, 1] |
0 |
细节平滑功能使能。 0: 关闭。 1: 使能。 |
DetailSmoothStr |
[0, 255] |
0 |
细节平滑强度。值越大,平滑强度越强。 |
DetailWgtThr |
[0, 255] |
0 |
细节平滑范围阈值。值越小,细节平滑作用的范围越大。 |
DetailWgtMin |
[0, 256] |
0 |
细节平滑强度允许之最小增益。 |
DetailWgtMax |
[0, 256] |
256 |
细节平滑强度允许之最大增益。 |
DetailWgtSlope |
[0, 1024] |
256 |
细节平滑强度斜率。值越大,细节平滑强度越强。64为 1x gain。 |
EdgeWgtThr |
[0, 255] |
160 |
边缘平滑范围阈值。值越小,边缘平滑作用的范围越大。 |
EdgeWgtMin |
[0, 256] |
0 |
边缘平滑强度允许之最小增益。 |
EdgeWgtMax |
[0, 256] |
256 |
边缘平滑强度允许之最大增益。 |
EdgeWgtSlope |
[0, 1024] |
256 |
边缘平滑强度斜率。值越大,边缘平滑程度越强。64为 1x gain。 |
DetailSmoothMapTh |
[0, 255] |
0 |
细节平滑强度映射范围阈值。值越小,边缘平滑作用的范围越大。 |
DetailSmoothMapMin |
[0, 256] |
0 |
细节平滑强度映射允许之最小值。 |
DetailSmoothMapMax |
[0, 256] |
256 |
细节平滑强度映射允许之最大值。 |
DetailSmoothMapSlope |
[0, 1024] |
256 |
细节平滑强度映射斜率。值越大,细节平滑强度越强。64为 1x gain。 |
5.8.1.3. 调试步骤¶

在做参数调试之前,请先确认表 4‑12所列的模块已经完成调试,且关键参数的默认值依照 表 5.12 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
AWB |
Tuned |
BNR |
Tuned |
3DNR |
Tuned |
Noise Profile |
Set |
步骤1. 首先,调节边缘粗调侦测阈值 CoarseEdgeThr 确定边缘范围。值越小,判断为 强边缘 的数量越多。同时适当地调节边缘粗调强度值 CoarseStr 来确定图像的纹理方向性的判断以及以降低强边缘做错方向造成的zipper effect,以获得初步的 强纹理 方向。
步骤2. 接着,调节边缘细调侦测阈值 FineEdgeThr 确定边缘范围。值越小,判断为 弱边缘 的数量越多。同时调节边缘细调强度 FineStr ,确定图像的纹理方向性的判断,以获得进一步的纹理方向确认。建议搭配Siemens Chart/ISO12233观察高频区方向正确性辅助调整,如果调高参数没有获得改善,需要检查 CoarseEdgeThr 是否设置过小, 可以将 CoarseEdgeThr 调高再观察效果。


步骤3. 通过调试参数 AntiFalseColorStr 来控制去伪色彩的强度。同时,调节 SatGainIn[2] 和 SatGainOut[2] 来针对低饱和度的区域减轻伪色彩。针对容易出现伪色彩的高频区域,可以调节 EdgeGainIn[2] 和 EdgeGainOut[2] 来调整强度,以及自定义欲保护的色彩 UserDefineProtectColor1 ~ UserDefineProtectColor3 ,避免被当成伪色彩被去除,其强度可以调节 ProtectColorGainIn[2] 和 ProtectColorGainOut[2] 来控制。
步骤4. 通过调试参数 DetailSmoothStr 来减少Demosaic由于受到sensor感光特性以及噪声等因素,影响方向的判断,在进行插值时所造成的伪细节,特别是常发生在高度密集的线条纹理区域。伪细节抑制功能可以使细节等表现更加自然。 DetailSmoothStr 越大,细节平滑功能越强,但增加过多会导致细节损失。如 图 5.17 所示,在进行细节平滑的同时,通过参数 DetailWgtThr 和 DetailWgtSlope 分别决定细节平滑的范围和强度,并且以 DetailWgtMin 和 DetailWgtMax 控制细节平滑程度的上下限。另外,如 图 5.18 所示,可以调节参数 EdgeWgtThr 和 EdgeWgtSlope 根据边缘强度分别决定平滑作用范围和强度以及 EdgeWgtMin 和 EdgeWgtMax 控制平滑强度的上下限。

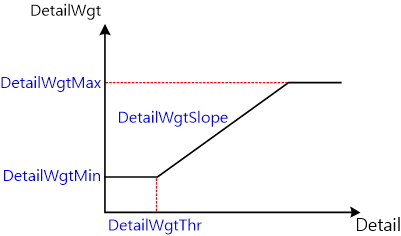
图 5.17 细节平滑时的细节大小Detail和平滑强度DetailWgt的关系曲线¶
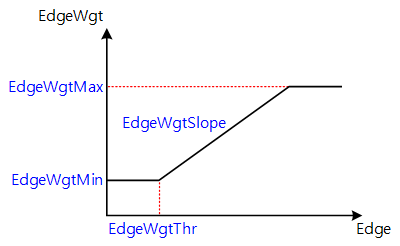
图 5.18 边缘平滑时的边缘强度和平滑强度EdgeWgt的关系曲线¶
—-结束
5.9. WDR¶
注:cv180x不支持此功能。
5.9.1. WDR调试方法¶
5.9.1.1. 功能描述¶
动态范围是指场景中最亮与最暗物体间的亮度差异范围,动态范围越大代表场景中亮度的层次越丰富。一般真实场景中的动态范围约为一般图像传感器可记录范围的数千至数十万倍。因此使用一般图像传感器拍摄高动态场景时,往往只能选择顾到低亮区,容易使得高亮区过曝,丢失高亮区细节。或是,顾到高亮区,使得低亮区曝光不足,低亮细节难以分辨。为了能记录高动态范围场景的每一个细节,需要使用高动态范围的图像传感器,或者使用多次曝光图像合成。但由于高动态范围图像传感器面积较大且价格偏高,限制了其实用性。因此,常见的HDR图像生成方式都是使用一般传感器获得若干不同曝光的固定场景图像,再用WDR算法来合成一幅高动态范围图像。 图 5.19 以二合一WDR为例,显示了长曝光画面,短曝光画面,以及WDR合成的画面。短曝光画面用来捕抓场景中亮区讯息,而长曝光画面用来捕获场景中暗区信息,经过WDR合成后获得高动态范围的图像。
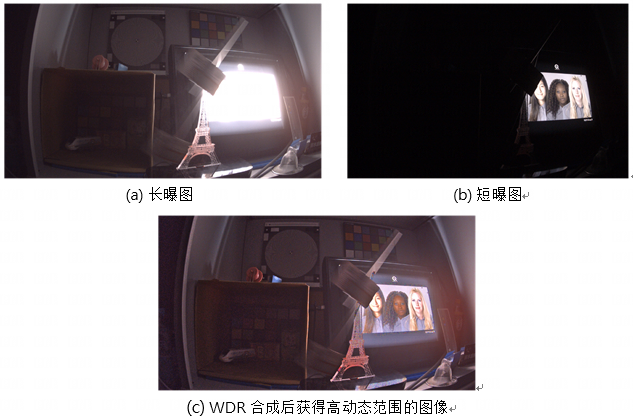
图 5.19 二合一WDR效果图¶
5.9.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
WDR模块使能。 0: 关闭。 1: 使能。 |
TuningMode |
[0, 9] |
0 |
0 : WDR融合画面。必须Enable DRC。 1 : 长曝画面。 2 :短曝画面。 3 :短曝*ExpRation的画面。必须Enable DRC。 |
WDRCombineLongThr |
[0, 4095] |
3300 |
第一次融合时,长曝光临界值,低于该临界值的图像数据将只选择长曝光数据合成WDR图像。 |
WDRCombineShortThr |
[0, 4095] |
3900 |
第一次融合时,短曝光临界值,超过该临界值的图像数据将只选择短曝光数据合成WDR图像。 |
WDRCombineMaxWeight |
[0 ,256] |
256 |
第一次融合时,长短曝图像数据融合最低权重值。权重值越大,融合时长曝光占的比重越多,反之则短曝光占的比重越多。 |
WDRCombineMinWeight |
[0 ,256] |
32 |
第一次融合时,长短曝图像数据融合最高权重值。权重值越大,融合时长曝光占的比重越多,反之则短曝光占的比重越多。 |
MotionCompEnable |
[0, 1] |
0 |
WDR根据运动信息进行融合使能开关。 0: 关闭。 1: 使能。 |
WDRMtIn[4] |
[0, 255] |
[16, 64, 128, 240] |
由四个数值组成的数组。定义输入物体运动量,值越大,运动量越大。 |
WDRMtOut[4] |
[0, 256] |
[0, 128, 224, 256] |
由四个数值组成的数组。定义输入物体运动量对应的运动增益,值越大,越倾向输出自定义的WDR 融合结果,与 WDRType 配合调适。 |
WDRType |
[0, 2] |
1 |
自定义 WDR 融合模式: 0: 输出乘上曝光比的短曝值。 1: 输出长曝值。 2: 输出长短曝融合后的数值。长曝的权重为 WDRLongWgt 。 |
WDRLongWgt |
[0, 256] |
128 |
当选择 WDRType 设定为 2时,设定长曝的融合权重。 MotionCompEnable 使能时才生效。 |
WDRDCMode |
[0, 1] |
0 |
长短曝融合模式 0: 一般模式,透过 WDRLumaMode 调整 1: DC模式 |
WDRLumaMode |
[0, 1] |
0 |
亮度计算模式, 0: 取 R/G/B 最大值。 1: 取 Luma 值。 MotionCompEnable 使能时才生效。 |
WDRCombineSNRAwareEn |
[0, 1] |
1 |
长短曝图像数据融合时根据短曝乘曝光倍率画面之讯噪比自适应融合权重调整机制使能。 |
WDRCombineSNRAwareLowThr |
[0, 65535] |
1024 |
讯噪比自适应融合权重调整机制的讯噪比低临界值。讯噪比低于此低临界值时融合权重不做调整,大于高临界值时权重。 |
WDRCombineSNRAwareHighThr |
[0, 65535] |
8192 |
自适应调整融合权重机致的讯噪比高临界值。 |
WDRCombineSNRAwareToleranceLevel |
[0, 255] |
128 |
讯噪比大于高临界值时权重上限值。 |
WDRCombineSNRAwareSmoothLevel |
[0, 3000] |
30 |
自适应调整融合权重的时间域变化平顺度。数值越大时间域变化越平顺,反之则变化越快。 |
WDRMotionFusionMode |
[0, 3] |
1 |
运动侦测模式。 0: Linear / Long mode。 1: Max mode。 2: Merge mode。MergeModeAlpha生效。 3: LUT mode。 |
MergeModeAlpha |
[0, 255] |
128 |
值越大,融合时短帧移动信息占的比重越多。反之则长帧移动信息占的比重越多。配合WDRMotionFusionMode=2使用。 |
WDRMotionCombineLongThr |
[0, 4095] |
3300 |
运动侦测信息,长曝光临界值,低于该临界值的图像数据将只选择长曝光数据合成WDR图像。配合WDRMotionFusionMode=3使用。 |
WDRMotionCombineShortThr |
[0, 4095] |
3900 |
运动侦测信息,短曝光临界值,超过该临界值的图像数据将只选择短曝光数据合成WDR图像。配合WDRMotionFusionMode=3使用。 |
WDRMotionCombineMaxWeight |
[0 ,256] |
256 |
运动侦测信息,长短曝图像数据融合最高权重值。权重值越大,融合时长曝光占的比重越多,反之则短曝光占的比重越多。配合WDRMotionFusionMode=3使用。 |
WDRMotionCombineMinWeight |
[0, 256] |
32 |
运动侦测信息,长短曝图像数据融合最低权重值。权重值越大,融合时长曝光占的比重越多,反之则短曝光占的比重越多。配合WDRMotionFusionMode=3使用。 |
LocalToneRefinedDCMode |
[0, 1] |
0 |
local tone refine是否参考DC资讯。 0: 不使用DC信息,参考LocalToneRefinedLumaMode。 1: 使用DC信息。 |
LocalToneRefinedLumaMode |
[0, 1] |
0 |
local tone refine luma mode。 0: 使用MaxRGB mode。 1: 使用luma mode。 |
5.9.1.3. 调试步骤¶
在做参数调试之前,请先确认 表 5.15 所列的模块已经完成调试,且关键参数的默认值依照 表 5.14 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
LSC |
Tuned |
AWB |
Tuned |
WDR的调试步骤共可区分为调试长短帧融合曲线,及调试运动侦测参数。
步骤1. 调试长短帧融合曲线,调整 WDRCombineShortThr , WDRCombineLongThr , WDRCombineMinWeight 和 WDRCombineMaxWeight,产生第一次融合图像,目标是确保画面中亮区不过曝以及暗区细节可见。
步骤2. 调试运动融合参数,调整 WDRMtIn[4] 以及 WDRMtOut[4] ,根据物体移动量,决定长帧与第一次融合图像的融合比例。调适原则为物体移动量越大时,长帧的融合权重越大。
步骤3. 调试运动检测参数,调整 WDRMotionFusionMode 。尽量保持背光区或是画面暗区的移动信息的完整性。
—-结束
长短帧融合曲线
参数 WDRCombineShortThr 和 WDRCombineLongThr 用来调整选择长短帧的临界值。其中, WDRCombineShortThr 为短曝光临界值,超过该值的图像数据将只选择短曝光数据合成WDR图像, WDRCombineLongThr 为长曝光临界值,低于该值的图像数据将只选择长曝光数据合成WDR图像。在两者之间的像素则采用长短帧融合的方式进行合成。 WDRCombineMinWeight 及 WDRCombineMaxWeight 则为长短曝图像数据融合最低及最占的比重越多。这四个参数的变化趋势如 图 5.20 所示,横轴代表输入为长帧的像素。 WDRCombineShortThr 值设小会有较多的像素选择短帧,噪声会变大;而值设大在亮区会有部分像素选择长帧融合,容易导致过曝,一般建议接近长曝像素最大值的97%。 WDRCombineLongThr 值设小,比较多的像素选择长短帧混和,暗区噪声会变大;值设大,比较多的像素选择长帧,可能会导致过曝,一般建议接近长曝像素最大值的80%。另外,在调适长短帧融合曲线时必须关闭 MotionCompEnable ,避免因受到运动侦测信息的影响,而产生不适当的调整。
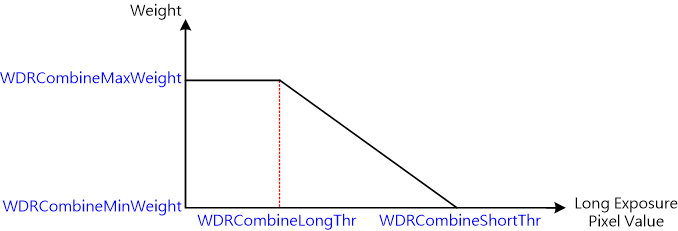
图 5.20 长短帧阈值的选择¶
调适运动检测参数
运动检测的信息影响长短帧融合的比例,物体运动越明显,则运动信息越大,物体越偏向静止,则运动信息越小,建议在运动区域倾向采用长帧来降低噪声。调整建议优先选用 WDRMotionFusionMode 为1的模式,选择长短帧当中较大的运动信息。
讯噪比自适应融合权重调整机制
短曝光影像乘曝光倍率会造成画面中有些亮区噪声被过度放大。讯噪比自适应融合权重调整机制能根据短曝光影像乘曝光倍率的讯噪比,自动调整融合权重使长曝光占比增加来抑制噪声被过度放大的效应。当讯噪比低于低临界值 WDRCombineSNRAwareLowThr 时融合权重套用长短帧融合曲线产生之权重不做调整,大于高临界值 WDRCombineSNRAwareHighThr 时权重套用上限权重值 WDRCombineSNRAwareToleranceLevel ,讯噪比介于高低临界值之间则在长短帧融合曲线产生之权重与上限值权重 WDRCombineSNRAwareToleranceLevel 间作调整。调整后的权重值越大,则长帧融合的占比比重越高,反之则占比比重越小。
5.10. DRC¶
5.10.1. 功能描述¶
动态范围是指场景中最亮与最暗物体间的亮度差异范围,动态范围越大代表场景中亮度的层次越丰富。因此使用一般图像传感器拍摄高动态场景时,往往只能选择顾到低亮区,容易使得高亮区过曝,丢失高亮区细节。或是,顾到高亮区,使得低亮区曝光不足,低亮细节难以分辨。为了能记录高动态范围场景的每一个细节,需要使用高动态范围的图像传感器,或如4.9“WDR”所描述的多次曝光合成技术。然而,考虑到一般显示器的动态范围较小,为了能完整保留所获取的宽动态图像中的细节,需要使用DRC算法在保留细节的同时对图像的动态范围进行压缩。DRC的目的,即是使观察者在观察高动态场景与观察显示设备上都能获得相同的视觉感受。
5.10.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
DRC模块使能。 0: 关闭。 1: 使能。 |
TuningMode |
[0, 7] |
0 |
调整模式,输出可视化辅助信息。 0: 不输出可视化辅助信息。 3: global tone亮度显示 4: bright tone亮度显示 5: dark tone亮度显示 |
LocalToneEn |
[0, 1] |
0 |
Local tone mapping的使能,包含 Bright tone mapping及Dark tone mapping。 0: 关闭。 1: 使能。 |
LocalToneRefineEn |
[0, 1] |
0 |
优化local tone mapping的始能,让区域分的更精细。 0: 关闭。 1: 使能。 |
ToneCurveSelect |
[0, 1] |
0 |
Tone curve曲线选择: 0: 选择用户自定义曲线。 1: 选择自适应曲线。 |
CurveUserDefine |
用户自定义曲线,可透过UI接口的控制点拉动曲线 |
||
WDR/SDR Histogram |
LE Histogram: 长曝影像的亮度统计图 SE Histogram: 短曝影像的亮度统计图 Global Tone Curve: 全局的tone mapping曲线可视化 Dark Tone Curve: 暗区的tone mapping曲线可视化 Bright Tone Curve: 亮区的tone mapping曲线可视化 |
||
ToneCurveSmooth |
[0, 500] |
300 |
Tone curve曲线时间域上变化的平顺度。数值越大时间域变化越平顺,反之则变化越快。 |
TargetYScale |
[0, 2048] |
224 |
控制经过Global tone mapping后的整体影像亮度。数值越大画面越偏亮,反之越偏暗。 |
HdrStrength |
[0, 255] |
256 |
控制HDR增强效果参数,数值越大整体亮度拉伸越强,反之则拉伸越弱。 |
DEAdaptPercentile |
[0, 25] |
10 |
定义暗处的百分位数,决定不加强的区域,值越大,不加强的区域越多。 |
DEAdaptTargetGain |
[1, 96] |
40 |
dark tone自适应目标的强化,值越大拉的越亮,32为一倍,40为1.25x |
DEAdaptGainUB |
[1, 255] |
96 |
dark tone自适应强化的上界,值越大拉的越亮,32为一倍,96为3x |
DEAdaptGainLB |
[1, 255] |
16 |
dark tone自适应强化的下界,值越大越不压黑,32为一倍,16为0.5x |
BritInflectPtLuma |
[0, 100] |
40 |
Bright Tone在长短曝交界区的亮度,值越大,亮度越高 |
BritContrastLow |
[0, 100] |
50 |
Bright Tone暗区的压暗程度,值越大,压暗越多 |
BritContrastHigh |
[0, 100] |
80 |
Bright Tone亮区的拉亮程度,值越大,拉升越多 |
SdrTargetYGainMode |
[0, 1] |
0 |
Gain Mode开关 0: 直接指定画面平均的目标亮度 1: 基于画面的平均,拉亮倍数1x=32 |
SdrTargetY |
[0, 255] |
56 |
全局性以global tone将画面拉亮,值越大,亮度拉高越多 |
SdrTargetYGain |
[32, 128] |
32 |
全局性以global tone将画面拉亮,目标亮度采用当前平均亮度的倍数,1x=32,2x = 64 |
SdrGlobalToneStr |
[0, 256] |
256 |
global tone的强度,值越大,global tone越强,反之则往linear tone靠近 |
SdrDEAdaptPercentile |
[0, 32] |
10 |
定义暗处的百分位数,决定不加强的区域,值越大,不加强的区域越多。 |
SdrDEAdaptTargetGain |
[1, 64] |
40 |
dark tone自适应目标的强化, 值越大拉的越亮,32为一倍,40为1.25x |
SdrDEAdaptGainUB |
[1, 255] |
96 |
dark tone自适应强化的上界,值越大拉的越亮,32为一倍,96为3x |
SdrDEAdaptGainLB |
[1, 255] |
16 |
dark tone自适应强化的下界,值越大越不压黑,32为一倍,96为3x |
SdrBritInflectPtLuma |
[0, 100] |
40 |
Bright Tone在亮暗交界区的亮度,值越大,亮度越高 |
SdrBritContrastLow |
[0, 100] |
75 |
Bright Tone暗区的压暗程度,值越大,压暗越多 |
SdrBritContrastHigh |
[0, 100] |
80 |
Bright Tone亮区的拉亮程度,值越大,拉升越多 |
DetailEnhanceEn |
[0, 1] |
0 |
Detail Enhance使能,加强HDR的细节。 0: 关闭。 1: 使能。 |
TotalGain |
[0, 255] |
32 |
细节加强整体的强度,32为一倍,64为2倍 |
LumaGainEn |
[0, 1] |
0 |
细节根据luma加强的始能。 0: 关闭。 1: 使能。 |
LumaGain[33] |
[0, 255] |
64 |
细节根据luma加强的权重。 由33个数值平均分成33段亮度区,每个亮度区对应一个亮度权重。对应亮度区间的值越大,像素点锐化越强,64为1倍 |
DeltailEnhanceMtIn[4] |
[0, 255] |
[0, 64, 1 28, 1 92] |
由四个数值组成的数组。定义输入物体运动量,值越大,对应的运动量越大。 |
DeltailEnhanceMtOut[4] |
[0, 256] |
[1 28, 1 28, 1 28, 1 28] |
由四个数值组成的数组。定义输入物体运动量对应的运动增益,值越大细节强度越强,256为一倍。 |
OverShootThd |
[0, 255] |
32 |
白边锐化上限幅度 |
UnderShootThd |
[0, 255] |
32 |
黑边锐化上限幅度 |
OverShootGain |
[0, 255] |
4 |
白边锐化的强度,16为一倍 |
UnderShootGain |
[0, 255] |
4 |
黑边锐化的强度,16为一倍 |
OverShootThrMax |
[0, 255] |
255 |
白边锐化最大上限幅度, |
UnderShootThrMin |
[0, 255] |
255 |
黑边锐化最大上限幅度 |
5.10.3. 调试步骤¶
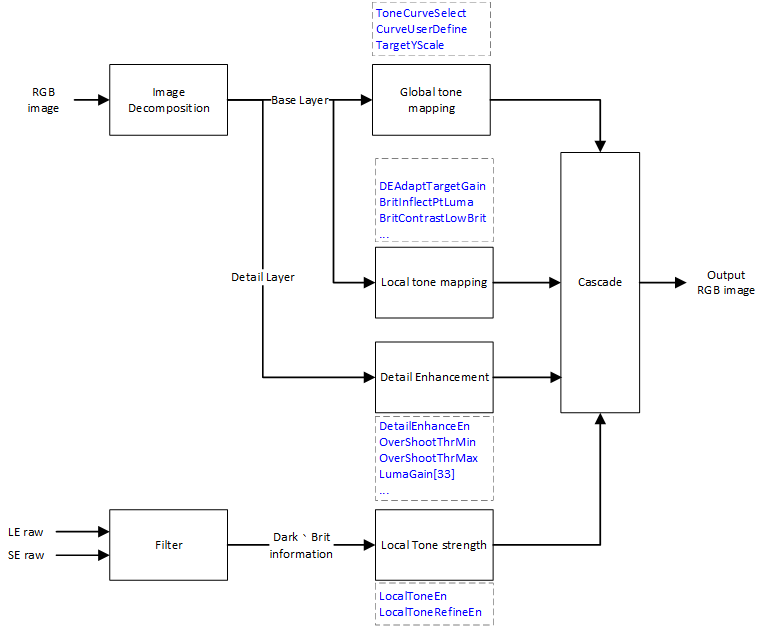
图 5.21 处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.17 所列的模块已经完成调试,且关键参数的默认值依照 表 5.16 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
AWB |
Tuned |
BNR |
Tuned |
WDR |
Tuned |
Noise Profile |
Set |
DRC的调适步骤如 图 5.21 所示。可区分为调整局部tone mapping特性 (local tone strength)、调整tone mapping曲线 (global tone mapping、local tone mapping) 、以及细节增强(detail enhancement)。
调整局部tone mapping特性
建议的顺序是先将LocalToneEn关闭,并调整Global Tone Mapping的参数,将画面的全局亮度调整到位,再开启LocalToneEn来开启局部的tone mapping,开启local tone mapping后可调整dark tone针对画面的暗区修饰,调整bright tone针对画面的亮区调整通透度。更进一步可将LocalToneRefineEn开启,开启对于暗区及亮区的区域分界做更精细的修正。
Globle Tone Mapping曲线调整
Global Tone Mapping曲线是一个亮度映像函数,X轴是输入亮度,Y轴是输出亮度,输入输出亮度皆正规化至0~1值域区间。曲线直接影响画面的整体亮度,通常整体曲线的拉升强度越大,画面整体越亮,反之则越暗。一般的tone mapping 曲线如 图 5.22 所示。
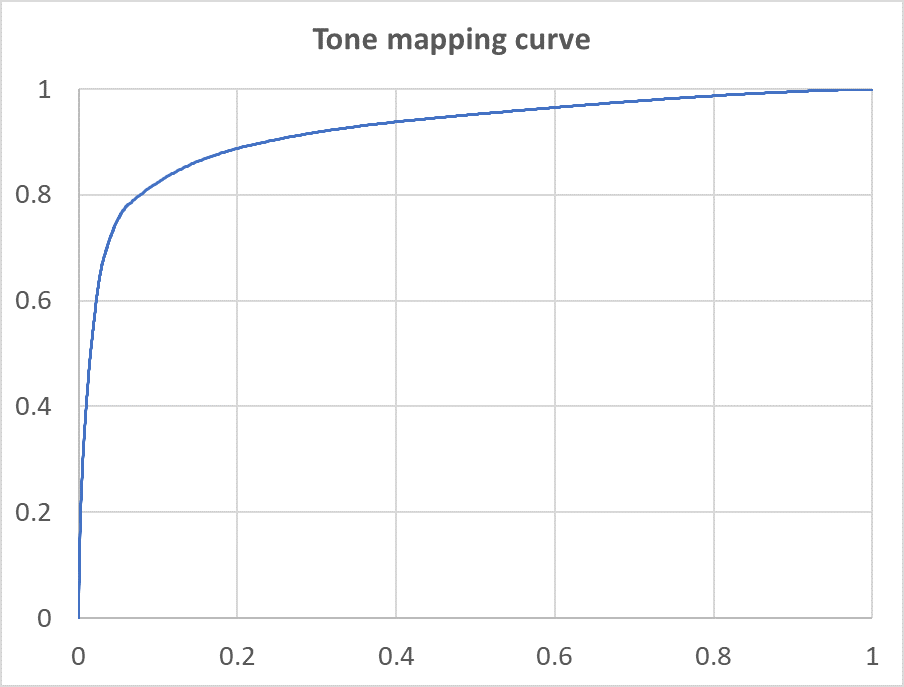
图 5.22 Tone mapping 曲线示例图¶
DRC模块支持tone mapping曲线生成参数,以Global Tone Mapping来说,其曲线形状可透过 TargetYScale、HdrStrength 参数决定,其中 TargetYScale 值越大,产生出的global tone mapping曲线对整体亮度的拉伸程度越大,反之则对亮度拉伸越小。当画面亮度拉伸太大时,导致画面中暗部偏亮,可透过 HdrStrength 来抑制亮度的拉伸,值越大则拉升的越大,值越小则可抑制整体的拉伸,其中以中暗部观察更为明显。当Global Tone Mapping对整体画面的亮度及通透感大致到位后,接着针对画面的暗区调整Dark Tone Mapping,针对画面的亮区调整Bright Tone Mapping。
Dark Tone Mapping曲线调整
针对画面的暗区,透过Dark Tone Mapping来调整暗区细节呈现及通透度,Dark Tone Mapping曲线是透过画面的统计量(histogram),来做自适应(adaptive),主要由 DEAdaptTargetGain ,来调整暗区的亮度拉升,值越大则暗区拉伸得越大,值越小则拉伸越小。当暗区亮区提升,虽然可呈现较多暗部细节,但拉亮了接近黑色的亮度区域,可能造成画面对比降低,为了同时兼顾暗区细节及对比,可调整 DEAdaptPercentile ,来保留的暗处的对比,值越大则保留不拉亮的暗处越多,值越小则保留的暗处越少。另一方面,为了控制自适应的敏感度,提供了 DEAdaptGainUB 及 DEAdaptGainLB 来限制自适应的范围。
Bright Tone Mapping曲线调整
针对画面的亮区,透过Bright Tone Mapping来调整亮区细节的呈现及通透度,Bright Tone Mapping曲线透过 BritInflectPtLuma ,来调整长短曝交界区的亮度,值越大则长短曝交界区的亮度越亮,值越小则越暗,接着以此为分界,透过 BritContrastLow 加强亮区中的暗处对比,值越大则对比越强,值越小则对比越弱,透过 BritContrastHigh 加强亮区中亮处的对比,值越大则对比越强,值越小则对比越弱。
曲线信息、统计信息可视化
当前的长曝histogram分布、短曝histogram、以及产生出的Global Tone Mapping 曲线、Dark Tone Mapping曲线、Bright Tone Mapping曲线,可透过tool来获取,获取的信息如下图所示。
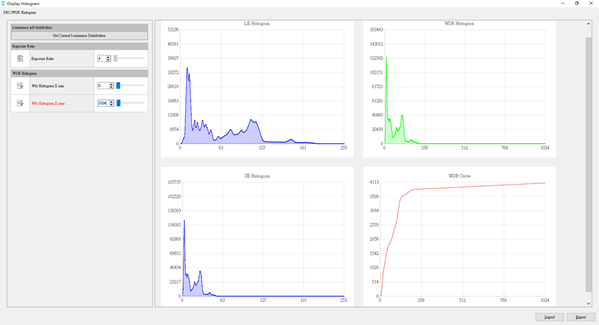
图 5.23 WDR 统计值方图和tone mapping 曲线示意图¶
用户自定义曲线(User Define Curve)
用户自定义曲线,目前定位成debug功能,当透过参数生成的tone maping曲线来调整画面达不到使用者的偏好及标准时,可透过用户自定义曲线,藉由手动拉伸曲线特性,来观察画面的变动。此外,用户自定义曲线不支持local tone mapping。 图 5.24
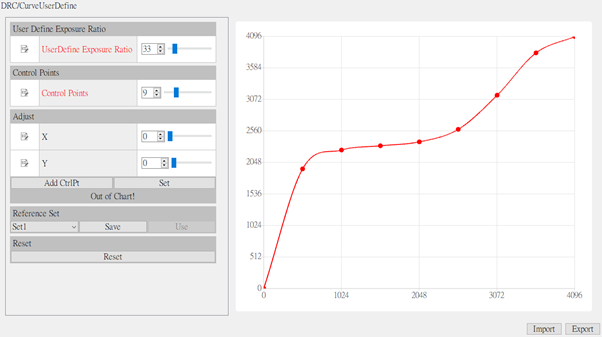
图 5.24 UserDefineCurve 曲线示意图¶
Detail Enhance细节增强、锐化
DRC模块支持细节的增强,可透过细节的增强来加强通透度,将 DetailEnhanceEn 开启,藉此开启DRC的细节增强功能,透过 TotalGain 调整整体细节锐化的强度,透过 LumaGain 针对不同亮度区域的细节做锐化调整,其余参数设计与PreSharpen、Sharpen模块一致,可参考PreSharpen及Sharpen的章节。
SDR DRC数字宽动态
SDR DRC数字宽动态,提供linear mode的tone mapping曲线调整,透过local tone mapping的特性调整画面的局部对比,其调整原则与WDR mode一致,可参考上述的描述做调整。
5.11. CCM¶
5.11.1. CCM标定方法¶
5.11.1.1. 环境及相关器材准备¶
请遵循以下步骤进行CCM标定:
采集设备准备:标准X-Rite 24色卡,照度为600Lux均匀光源(左右两侧光源,光源与色卡平面的夹角在25度到45度之间),IPC。
调整AE目标亮度,PQ Tool显示页面上查看第20色块的G值在201附近,第21色块的G值在163附近就表示曝光合适。
采集中性灰RAW图像,检查IPC的镜头阴影程度。Lens shading较严重时,需要先标定shading系数,24色卡图像需要先进行shading校正后,在进行CCM标定。
5.11.1.2. CCM标定工具界面¶
采集图像后,将 ISP 标定工具的主功能标签页切换到 CCM,即可看到 CCM标定的界面,如 图 5.25 所示。 CCM标定工具主要可以分为两个部分:
控制区:进行CCM标定时的主要功能 (红色框选区域)。
显示区:显示输入图像 (蓝色框选区域)。
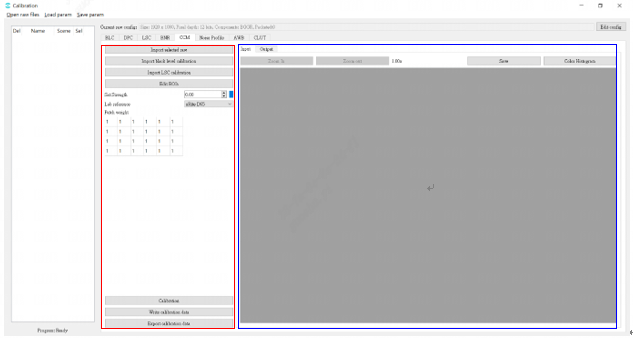
图 5.25 CCM标定工具界面¶
CCM标定工具界面的标定参数包含:
导入BLC校正参数。
导入LSC校正参数。
ISP Gamma和Display Gamma。
LAB参考值。
6x4色块权重表格,分别对应24色块的位置。数值范围为1.0到16.0的浮点数。
CCM开始校正按钮。
输出CCM校正结果。
5.11.1.3. CCM标定步骤¶
请遵循以下步骤进行CCM标定:
步骤1. 在标定工具的主界面导入需要进行CCM标定的RAW数据。
步骤2. 导入24色卡的RAW图像。
步骤3. 选取24色区域。
步骤4. 配置标定参数 (GAMMA,LAB,色块权重)。
步骤5. 点击CCM Calibration按钮进行标定,获得CCM结果。
5.11.2. CCM调试方法¶
5.11.2.1. 功能描述¶
一般来说,人眼对于光谱的反应,与sensor RGB三色分量对光谱的响应是有偏差的。为了使撷取的画面与人眼视觉感受上的颜色保持一致,我们可通过一个色彩校正矩阵来校正光谱响应的交叉效应与响应强度。CCM标定工具支持对24色卡进行3x3 color correction matrix的预校正。一般而言,建议主要使用CA和Saturation 模块来调整画面的饱和度。
5.11.2.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
CCM功能使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
CCM工作类型。 0: 自动模式 (OP_TYPE_AUTO); 1: 手动模式(OP_TYPE_MANUAL)。 |
ISOActEnable |
[0, 1] |
0 |
低照度下CCM Bypass功能使能。 0: 关闭。 1: 使能。 |
TempActEnable |
[0, 1] |
0 |
高低色温下CCM Bypass功能使能。 0: 关闭。 1: 使能。 |
CCMTabNum |
[3, 7] |
3 |
当前配置的CCM矩阵个数。 |
CCMTab[7].ColorTemp |
[500, 30000] |
5000 |
不同色温下的颜色校正矩阵对应的色温值。 |
CCM Tab[7].CCM[9] |
[-8192, 8191] |
1024 |
不同色温下的CCM矩阵系数。 |
SatEnable |
[0, 1] |
0 |
手动模式下,饱和度是否生效。 |
Manual.CCM[9] |
[-8192, 8191] |
1024 |
手动模式下,CCM矩阵系数。 |
RedCastGain |
[1, 4095] |
1024 |
手动设定白平衡红色通道增益。 |
GreenCastGain |
[1, 4095] |
1024 |
手动设定白平衡绿色通道增益。 |
BlueCastGain |
[1, 4095] |
1024 |
手动设定白平衡蓝色通道增益。 |
SaturationLE |
[0, 255] |
128 |
长曝饱和度 |
SaturationSE |
[0, 255] |
128 |
短曝饱和度 |
5.11.2.3. 调试步骤¶
请参考 5.11.1 CCM标定方法 章节完成CCM标定。接着,打开 SatEnable ,观察在不同光源下图像的饱和度是否如预期的变化。
5.12. Gamma¶
5.12.1. Gamma调试方法¶
5.12.1.1. 功能描述¶
Gamma主要是在图像的亮度空间进行非线性转换以适配输出显示设备。图像的R、G和B通道可以使用同一组Gamma表。Gamma表各节点之间的间距相同,并且使用线性插值方法生成节点之间的图像像素。当图像的对比度和通透性需要调优的时候,可以尝试先调节Gamma模块来改善。
5.12.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
Gamma功能使能。 0: 关闭。 1: 使能。 |
CurveType |
[0, 3] |
2 |
· Gamma曲线类型。 0: GAMMA_DEFAULT。 1: GAMMA_SRGB。 2: GAMMA_USER_DEFINE 3: GAMMA_AUTO |
GammaCOEFFI |
[0.01, 20] |
1 |
用来控制Gamma曲线生成的形状。 |
SlopeAtZero |
[0.01, 20] |
20 |
用来控制Gamma零点附近的斜率大小。 |
Control PointsNum |
[2, 32] |
2 |
手动拖动曲线的点数 |
Auto Gamma |
可以根据不同的环境亮度来设定不同的Gamma曲线。 |
||
GammaTabNum |
[1, 5] |
4 |
Auto Gamma table数量 |
5.12.1.3. GammaCOEFFI和SlopeAtZero参数说明¶
针对不同的场景,调节参数 GammaCOEFFI 来控制Gamma曲线的生成形状,使用参数 SlopeAtZero 来控制Gamma零点附近的斜率大小。
两个参数对于Gamma曲线形状的影响如下所示:
当 GammaCOEFFI 等于1时,输出的曲线是一条直线。当 GammaCOEFFI 大于1时,曲线向下凹,此时不用限制斜率,SlopeAtZero 参数对曲线无作用。当 GammaCOEFFI 小于1时,曲线向上凸,低亮度区域的斜率较大,因此需要 SlopeAtZero 参数进行限制斜率。
当 GammaCOEFFI 小于1时,在相同的 SlopeAtZero 的情况下,曲线在零点附近的斜率一致,而曲线的形状会随着参数 GammaCOEFFI 的不同而不同,变化趋势如下图。

图 5.26 GammaCOEFFI对Gamma曲线的影响¶
当 GammaCOEFFI 小于1时,在相同的 GammaCOEFFI 的情况下,曲线整体的形状不变,只是在零点附近的斜率会随着参数 SlopeAtZero 的变化而不同,会有轻微偏移的现象。整体变化趋势如下图。

图 5.27 SlopeAtZero对Gamma曲线的影响¶
5.12.1.4. 使用参数调试自定义曲线¶
步骤1. 在Gamma页面将 “CurveType” 切换成 “GAMMA_USER_DEFINE”。
步骤2. 直接在 “GammaCOEFFI” 和 “SlopeAtZero” 输入想要的数值。
步骤3. 可看到目前的Gamma曲线
步骤4. 可使用 ”Save”按钮将目前的Gamma曲线储存,以便之后加载使用。
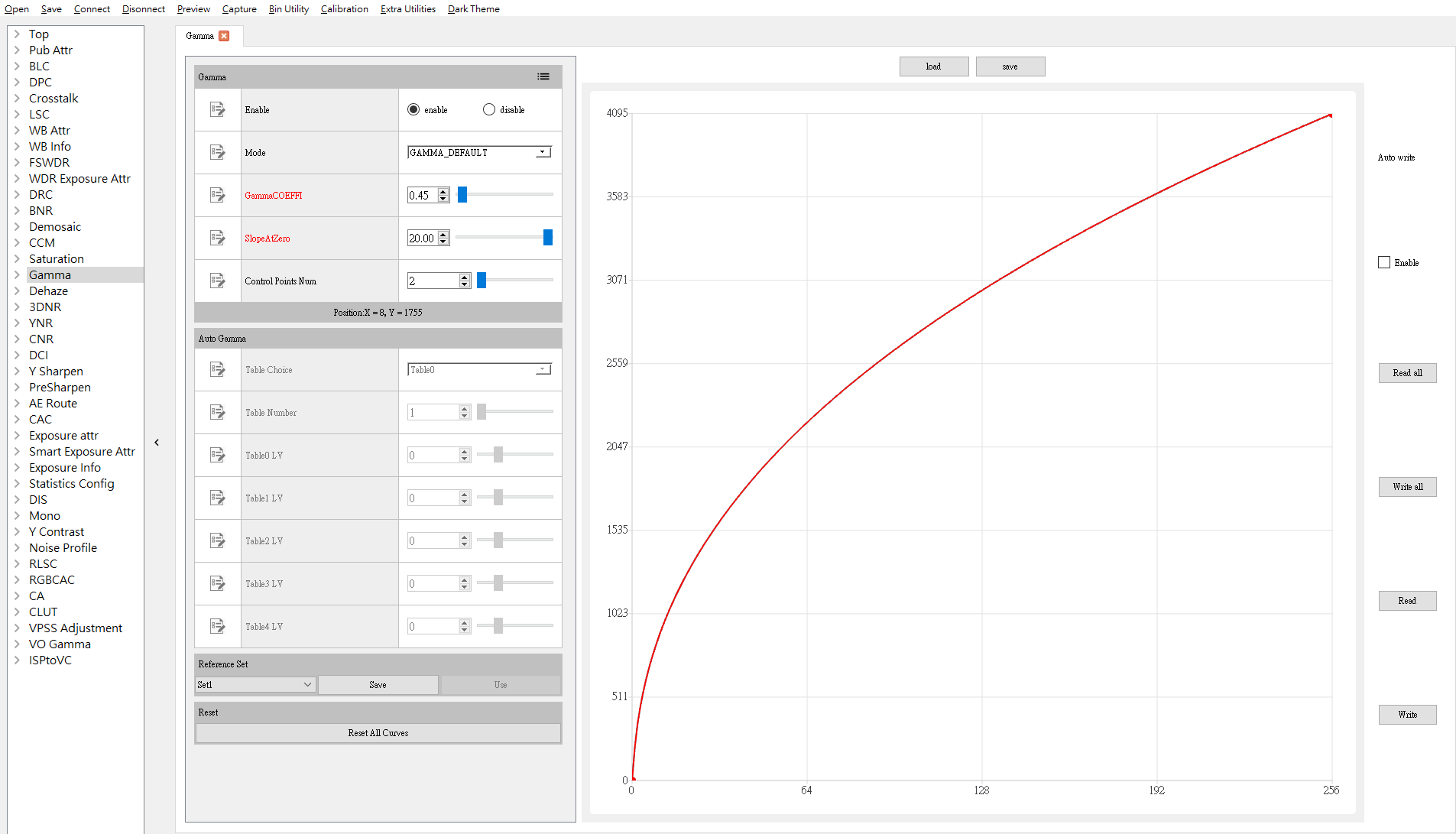
图 5.28 使用参数调适自定义曲线示意图¶
5.12.1.5. 使用控制点调试自定义曲线¶
步骤1. 在Gamma页面将 “CurveType” 切换成 “GAMMA_USER_DEFINE”。
步骤2. 如果之前有储存的Gamma曲线,可用 “Load” 按钮加载。
步骤3. 直接在 “Gontrol Point Num” 输入想要的控制点数量。
步骤4. 可直接用鼠标左键拖移Gamma 曲线上的控制点
步骤5. 可使用 “Save ” 按钮将目前的Gamma曲线储存,以便之后加载使用。
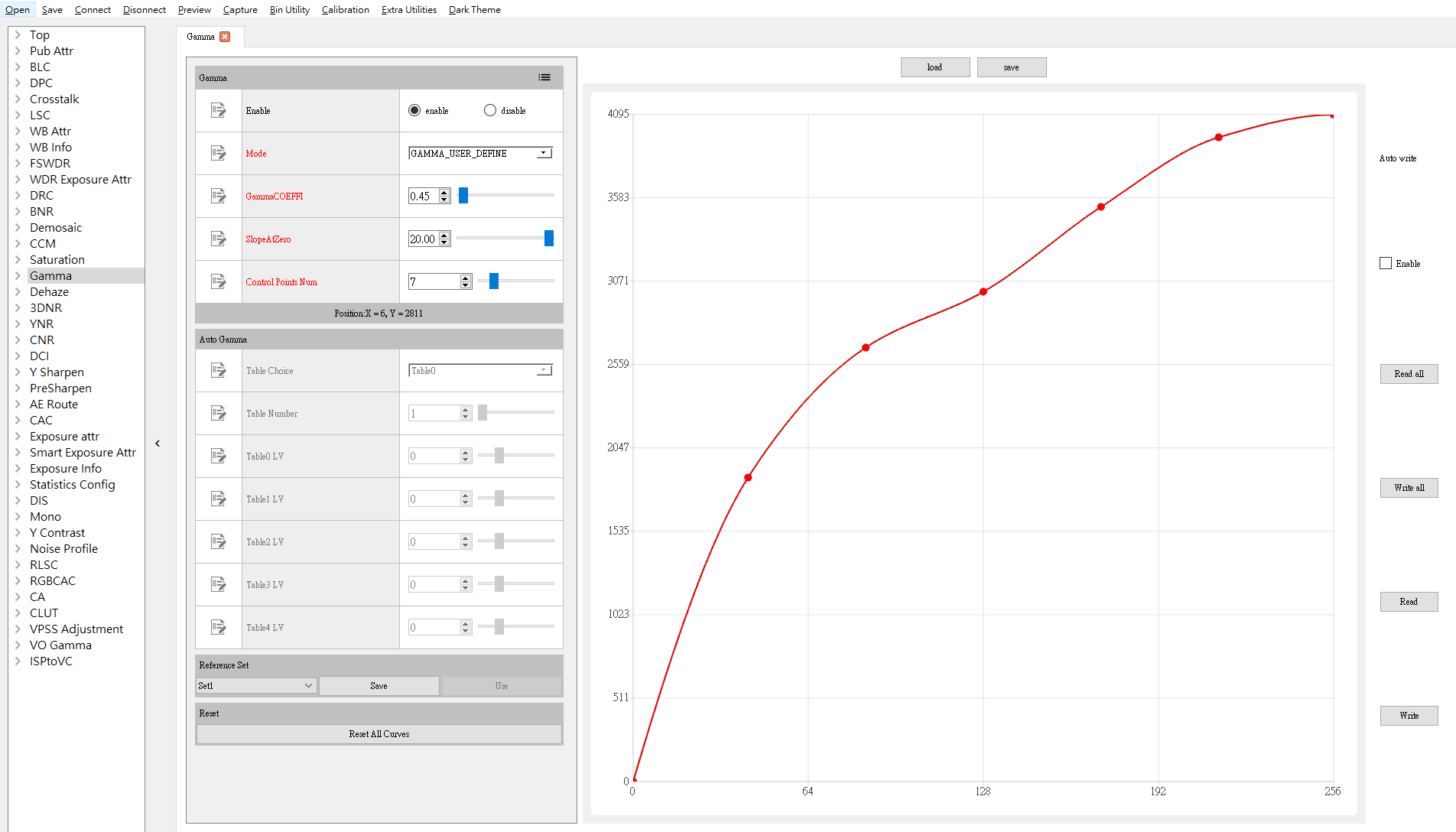
图 5.29 使用控制点调适自定义义曲线示意图¶
5.13. Dehaze¶
5.13.1. Dehaze调试方法¶
5.13.1.1. 功能描述¶
去雾算法主要是在有雾场景中做去雾处理,使图像的对比度和色彩饱和度提升,增加场景的清晰度。去雾算法藉由计算图像内容的统计值,估算出雾的浓度,并自适应调整去雾的强度。
5.13.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
Dehaze功能使能。 0: 关闭。 1: 使能。 |
Strength |
[0, 100] |
60 |
用来控制Dehaze的强度。值越大,去雾强度越强。 |
MinTransMapValue |
[0, 8191] |
819 |
透射系数允许之最小值。 |
CumulativeThr |
[0, 16383] |
1024 |
计算雾浓度的统计阈值。默认值约为原始图像总像数个数的0.05%。 |
DehazeLumaEnable |
[0, 1] |
0 |
根据亮度调整去雾强度功能使能。 0: 关闭。 1: 使能。 |
DehazeSkinEnable |
[0, 1] |
0 |
根据肤色调整去雾强度功能使能。 0: 关闭。 1: 使能。 |
SkinCb |
[0, 255] |
124 |
自定义肤色 在 Cb domain上的坐标。 |
SkinCr |
[0, 255] |
132 |
自定义肤色 在 Cr domain 上的坐标。 |
AirLightMax |
[0, 4095] |
4013 |
Airlight 可允许之最大值。 |
AirLightMin |
[0, 4095] |
3276 |
Airlight 可允许之最小值。 |
AirLightMixWgt |
[0, 32] |
0 |
Airlight 混和权重。 |
AirlightDiffWgt |
[0, 16] |
0 |
Airlight。 |
DehazeLumaCOEFFI |
[0, 255] |
0.5 |
根据亮度控制去雾强度曲线,将亮度区分为16阶。值越大,去雾强度越强。 |
DehazeSkinCOEFFI |
[0, 255] |
0.25 |
根据肤色控制去雾强度曲线,将亮度区分为16阶。值越大,去雾强度越强。 |
DehazeWgt |
[0, 32] |
0 |
Dehaze 输出混和权重。 |
TransMapScale |
[0, 255] |
16 |
透射系数增益。 |
TransMapWgt
|
|
|
透射系数增益控制,决定 Dehaze 结果与原图融合的权重曲线。Wgt 越大,融合原图的比例越大。Sigma越大,跟原图融合的像素数量越多。 |
5.13.1.3. 调试步骤¶
针对有雾场景的图像,根据需求调节参数 Strength ,改善整体图像的对比度和清晰度。原则上,除了 Strength ,其他参数依照建议的默认值配置即可。
说明
去雾强度越大,图像整体对比度和色彩饱和度越高,可能会损失暗区的细节。因此,应根据实际场景做一个折衷的参数调试。
去雾使能后,为了让画面正常显示,延迟两帧生效。
5.13.1.4. Dehaze 参数¶
分别调节参数 DehazeLumaCOEFFI 和 DehazeSkinCOEFFI 来根据亮度和肤色控制曲线的生成形状,两者曲线的调适方法相同,且与Gamma类似。
以 DehazeLumaCOEFFI 为0.45时为例,对于曲线形状的影响如下 图 5.30 所示:
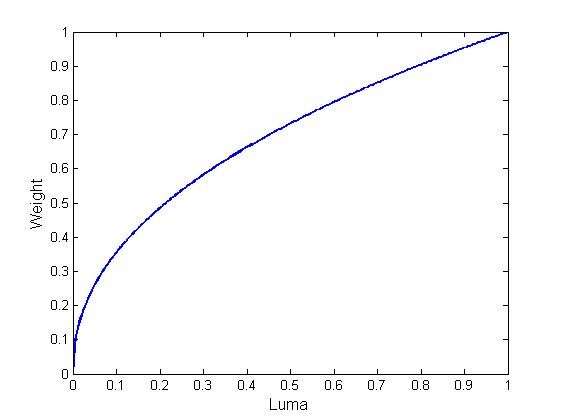
图 5.30 GammaCOEFF对Gamma曲线的影响¶
5.14. RGBCAC¶
5.14.1. RGBCAC调试方法¶
5.14.1.1. 功能描述¶
RGBCAC (Chromatic Abberation Correction) 主要是用来消除图像中出现的紫边问题。
5.14.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
RGBCAC模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
RGBCAC工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
PurpleDetRange0 |
[0, 128] |
64 |
长帧紫边侦测的阈值。值越大,越多区域被判断为紫边。 |
PurpleDetRange1 |
[0, 128] |
96 |
短帧紫边侦测的阈值。值越大,越多区域被判断为紫边。 |
DePurpleStr0 |
[0, 255] |
16 |
长帧去紫边强度。值越大,紫边现象越少。 |
DePurpleStr1 |
[0, 255] |
16 |
短帧去紫边强度。值越大,紫边现象越少。 |
DePurpleStrMax0 |
[0, 255] |
232 |
长帧去紫边强度可允许之最大值。 |
DePurpleStrMin0 |
[0, 255] |
0 |
长帧去紫边强度可允许之最小值。 |
DePurpleStrMax1 |
[0, 255] |
232 |
短帧去紫边强度可允许之最大值。 |
DePurpleStrMin1 |
[0, 255] |
0 |
短帧去紫边强度可允许之最小值。 |
EdgeGlobalGain |
[0, 4095] |
64 |
边缘侦测的强度总增益。 |
DePurpleCrStr0 |
[0, 16] |
8 |
长帧 R 通道校正边强度。 |
DePurpleCbStr0 |
[0, 16] |
8 |
长帧 B 通道校正边强度。 |
DePurpleCrStr1 |
[0, 16] |
8 |
短帧 R 通道校正边强度。 |
DePurpleCbStr1 |
[0, 16] |
8 |
短帧 B 通道校正边强度。 |
EdgeGainIn[3] |
[0, 16] |
[1, 2, 12] |
由三个数值组成的数组。定义边缘强度等级,值越大,边缘强度越强。 |
EdgeGainOut[3] |
[0, 32] |
[0, 16, 32] |
由三个数值组成的数组。定义边缘强度增益,值越大,去紫边效果越强。 |
PurpleCb |
[0, 4095] |
3712 |
第一组自定义紫边在Cb domain的坐标。 |
PurpleCr |
[0, 4095] |
2832 |
第一组自定义紫边在Cr domain的坐标。 |
PurpleCb2 |
[0, 4095] |
3712 |
第二组自定义紫边在Cb domain的坐标。 |
PurpleCr2 |
[0, 4095] |
2832 |
第二组自定义紫边在Cr domain的坐标。 |
PurpleCb3 |
[0, 4095] |
3712 |
第三组自定义紫边在Cb domain的坐标。 |
PurpleCr3 |
[0, 4095] |
2832 |
第三组自定义紫边在Cr domain的坐标。 |
GreenCb |
[0, 4095] |
688 |
绿色在Cb domain的坐标。 |
GreenCr |
[0, 4095] |
336 |
绿色在Cr domain的坐标。 |
TuningMode |
[0, 2] |
0 |
输出元文件案,辅助调节参数。 0: RGBCAC图像结果。 1: 边缘侦测图像结果。 2: 紫边侦测图像结果。 |
5.14.1.3. 调试步骤¶
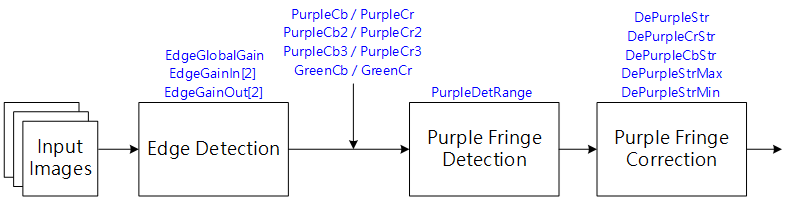
图 5.31 RGBCAC处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.37 所列的模块已经完成调试,且关键参数的默认值依照 表 5.36 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
BNR |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
步骤1. 调节 EdgeGlobaGain 决定边缘侦测的总强度增益。若只需校正强边缘处的紫边,可以适当地调整 EdgeGainIn[2] 和 EdgeGainOut[2] ,提高针对强边缘对应的增益值。
步骤2. 调节 PurpleDeRange 决定被检测为紫边的范围。适当地增加 PurpleDeRange 使得高亮处有明显紫边的区域能被检测出。若发现图像中高亮处正常紫色被校正掉,则需减小 PurpleDeRange ,来保护正常的紫色区域。
步骤3. 经由上述步骤配置完的检测参数之后,可以依据需求调整 DePurpleStr 来决定紫边的校正强度。更进一步,可以分别调整 DePurpleCrStr 和 DePurpleCbStr 来决定 R和B 通道的校正强度。
5.15. LCAC¶
5.15.1. LCAC调试方法¶
5.15.1.1. 功能描述¶
LCAC (Chromatic Abberation Correction) 主要是用来消除图像中出现的紫边问题。
5.15.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
LCAC模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
LCAC工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
DePurpleCrGain |
[0, 4095] |
32 |
R 通道紫边校正增益。32 为 1x gain。 |
DePurpleCbGain |
[0, 4095] |
32 |
B 通道紫边校正增益。32 为 1x gain。 |
DePurpleCrStr0 |
[0, 64] |
32 |
长帧 R 通道校正强度。 |
DePurpleCbStr0 |
[0, 64] |
32 |
长帧 B 通道校正强度。 |
DePurpleCrStr1 |
[0, 64] |
32 |
短帧 R 通道校正强度。 |
DePurpleCbStr1 |
[0, 64] |
32 |
短帧 B 通道校正强度。 |
FilterTypeBase |
[0, 3] |
0 |
滤波器选择。值越大,去紫边强度越强。 |
EdgeGainBase0 |
[0, 64] |
28 |
长帧边缘侦测的强度增益。 |
EdgeGainBase1 |
[0, 64] |
35 |
短帧边缘侦测的强度增益。 |
EdgeCoringBase |
[0, 255] |
0 |
边缘侦测的噪声抑制控制。 |
FilterTypeAdv |
[0, 3] |
0 |
进阶滤波器选择。值越大,去紫边强度越强。 |
EdgeGainAdv0 |
[0, 64] |
28 |
长帧边缘侦测的进阶强度增益。 |
EdgeGainAdv1 |
[0, 64] |
35 |
短帧边缘侦测的进阶强度增益。 |
EdgeCoringAdv |
[0, 255] |
0 |
边缘侦测的噪声抑制控制。 |
EdgeWgtBase
|
|
|
根据边缘强度控制去紫边程度,决定去紫边结果与原图融合的权重曲线。 Wgt 越大,融合原图的比例越小。 Sigma 越大,跟原图融合的像素数量越多。 |
EdgeWgtAdv
|
|
|
根据边缘强度控制去紫边程度,决定去紫边结果与原图融合的权重曲线。 Wgt 越大,融合原图的比例越小。 Sigma 越大,跟原图融合的像素数量越多。 |
5.15.1.3. 调试步骤¶
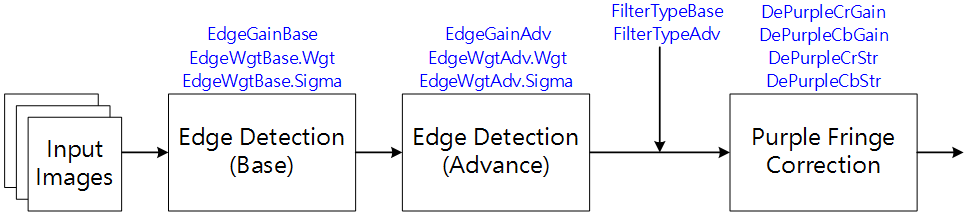
图 5.32 LCAC处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.37 所列的模块已经完成调试,且关键参数的默认值依照 表 5.36 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
BNR |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
步骤1. 首先,调节 EdgeGainBase 决定边缘侦测的强度增益。若只需校正强边缘处的紫边,可以适当地调整 EdgeWgtBase.Wgt 和 EdgeWgtBase.Sigma ,提高针对强边缘对应的增益值,前者控制边缘侦测强度的最大值,后者决定边缘侦测的范围。
步骤2. 调适原则跟步骤 1 相同,先从步骤3开始调适。 EdgeGainAdv 、 EdgeWgtAdv.Wgt 和 EdgeWgtAdv.Sigma 建议可先采取默认值。视需求可先从 EdgeGainAdv 开始调适。
步骤3. 调节 DePurepleCrGain 和 DePurepleCbGain 分别决定R信道和B信道的紫边校正强度。
5.16. CLUT¶
5.16.1. CLUT标定方法¶
CLUT 标定是以用户所提供的 24 色卡或用户自定义的来源及目标色彩对,建立输入图像及目标图像间的 3D 映像表。CLUT 算法将对图像进行逐像素的映像,以满足用户对色彩调节的需求。标定的目的是藉由输入图像和目标图像的 RGB 对来决定 CLUT 对各种颜色的三维调动分量。
5.16.1.1. 环境及相关器材准备¶
标准 24 色卡
均匀光源 (D50 或 D65 灯箱)
待标定装置及目标标定装置
固定镜头,调整镜头与色卡的距离,使拍摄到的色卡覆盖成像屏幕的范围至少 1/2。
5.16.1.2. CLUT标定工具界面¶
将 ISP 标定工具的主功能标签页切换到 CLUT,即可看到 CLUT 标定的界面。
标定界面包含四个部分:
图像控制区:进行 CLUT 标定时输入图像的控制功能 (红色框选区域)。
其中包含的项目功能:
选择待标定图档 (图档可支持 jpg 或 bmp)
定位代标定图文件色块位置
选择目标图檔 (图档可支持 jpg 或 bmp)
定位目标图文件色块位置
显示图像区: 显示读取的标定图档内容与色块范围 (蓝色框选区域)。
CLUT 控制区: 进行 CLUT 标定时的主要控件目 (橘色框选区域)。
其中包含的按钮:
色彩选定钮,确认色块定位完成后,按下进行获取色块信息
亮度不变选项,可依输入的图像进行勾选 (如果不希望 CLUT 进行亮度的校正可以勾选此项目,内部算法可以进行调整以降低 CLUT 对亮度调教的作用。建议事先对待标定图文件与目标图文件进行亮度上的对标,以降低算法进行亮度对齐行为而对色块的影响。)
校正钮,进行 CLUT 校正
写入校正数据,将校正后的 CLUT 信息写入板端
导出校正数据,将校正后的 CLUT 信息导出存盘
RGB 色彩对区: 显示标定色块的色彩信息 (绿色框选区域)。
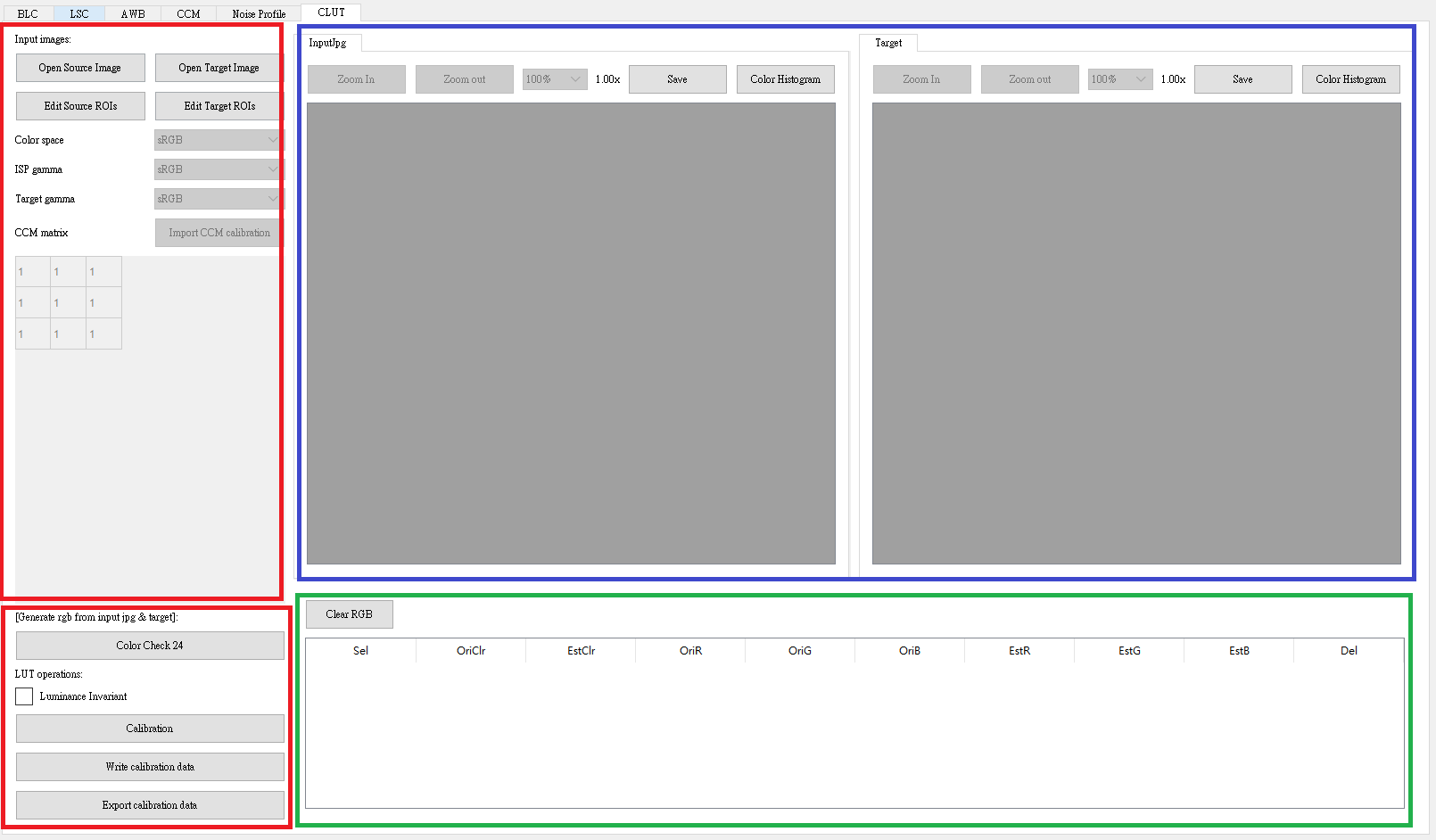
图 5.33 CLUT标定工具界面¶
5.16.1.3. CLUT标定步骤¶
由于图像的亮度、白平衡、Gamma 曲线、CCM 参数及 shading 有可能会影响 CLUT 标定的准确度。所以在进行 CLUT 标定之前,必须要确保待标定装置和目标装置的 AWB、亮度及灰阶表现一致并进行 shading 校正再进行 CLUT 标定。
步骤1. 以 D50 或 D65 灯箱光源提供约 600lux 照度,以待标定装置拍摄及目标装置对着 24 色卡拍摄,档案的取得可以由 CviPQTool Preview 功能产生 BMP 档案或由后端串流程式进行图像的取得 (BMP 或 JPG 档案)。
步骤2. 由于多数目标装置无法进行亮度微调的动作,而不同装置对于亮度的调教策略亦有所不同,所以我们需要针对待标定装置进行手动微调进而达到亮度对目标结果 (此一动作主要是让 CLUT 仅针对颜色色调进行校正不包含亮度校正,亮度的对齐需由其他模块进行调整),在进行亮度对目标动作时可以藉由 24 色卡内第 21色色块取得其 G 通道的值,调整待标定装置曝光功能进行微调 (如 EvBias 项目或是增益项目),待 21 色色块其 G 信道的值与目标装置截图趋近一致时即代表完成。
步骤3. 点击 “Open Source Image” 与 “Open Target Image” 按钮,进行加载待标定装置及目标装置所拍摄之影像档案。
步骤4. 点击 “Edit Source ROIs” 与 “Edit Target ROIs” 按钮,进行待标定图像及目标图像的色块框选。
步骤5. 产生相对应的色彩对。按下 “Color Check 24” 按钮将上一阶段选定的色块信息萃取到 RGB 色彩对区。
步骤6. 亮度不变选项 “Luminance Invariant”,可依输入的图像进行勾选,此选项允许算法可以进行前处理,统一调整输入色块于亮度的部分对齐目标图色块,藉以降低 CLUT 对亮度调教的作用。
步骤7. 点击 “Calibration” 按钮,等待数分钟工具内部可产生 CLUT 标定参数。
步骤8. 将产生的 CLUT 套用至待标定装置确认色彩调节的效果 (透过 “Write calibration data” 按钮直接写入到板端) 或 “Export calibration data” 按钮汇出 CLUT 标定内容。
图 5.34 标准24色卡第19号 (蓝圈处) 与第21号色块 (红圈处)¶
5.16.2. CLUT调试方法¶
5.16.2.1. 功能描述¶
提供喜好色调节功能,通过对线性RGB空间做17x17x17 3D LUT来达到对喜好色的调节,如绿色、蓝色、肤色的细化调节。
5.16.2.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
CLUT模块使能。 0: 关闭。 1: 使能。 |
ClutR[17*17*17] |
[0, 4095] |
0 |
针对R channel调整。在R,G,B 值域范围分成16段。 |
ClutG[17*17*17] |
[0, 4095] |
0 |
针对G channel调整。在R,G,B 值域范围分成16段 |
ClutB[17*17*17] |
[0, 4095] |
0 |
针对B channel调整。在R,G,B 值域范围分成16段 |
5.16.2.3. 调试步骤¶
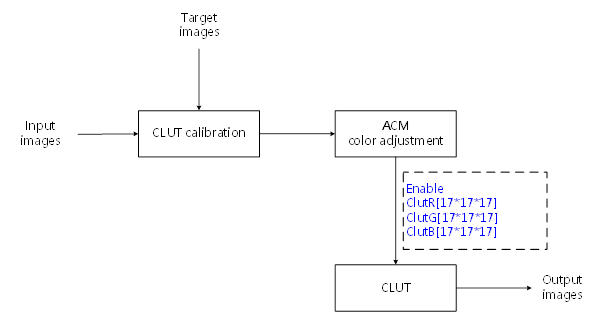
图 5.35 CLUT处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.26 所列的模块已经完成调试,且关键参数的默认值依照 表 5.25 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
MLSC |
Tuned |
AWB |
Tuned |
CCM |
Tuned |
GAMMA |
Tuned |
DCI |
Tuned (if enabled) |
CLUT Calibration |
Tuned |
5.17. PreSharpen¶
5.17.1. PreSharpen调试方法¶
5.17.1.1. 功能描述¶
PreSharpen模块用于增强图像清晰度,位于3DNR之前,可以锐化图像中的边缘和细节纹理。通过不同频段的多种强度组合,可以实现多种风格的清晰度增强效果,同时也提供锐化后的白边白点(Over Shoot)与黑边黑点(Under Shoot)抑制。图 5.36 为Sharpen模块的系统框架图,黑色字体为数据流图,蓝色字体为开放调节的参数接口。
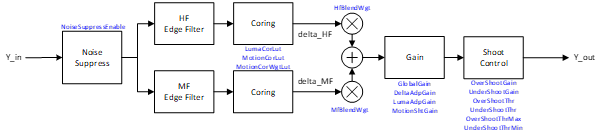
图 5.36 PreSharpen模块的系统框架图¶
5.17.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
Pre-S harpen模块使能。 0: 关闭。 1: 使能。 |
OpType |
OP_TYPE_AUTO, OP_TYPE_MANUAL |
OP_TYPE_MANUAL |
工作类型 OP_TYPE_AUTO: 自动模式 OP_TYPE_MANUAL: 手动模式 |
LumaAdpGainEn |
[0, 1] |
1 |
亮度锐化权重使能 |
LumaAdpGain[33] |
[0, 63] |
16 |
亮度锐化权重。(1x | = 64) ※由33个数值平均分成33段亮度区,每个亮度区对应一 个亮度权重。对应亮度区间的值越小,像素点锐化越弱 |
LumaCorLutIn[4] |
[0, 255] |
[0, 64, 128, 192] |
基于luma的coring,此为输入节点,输入luma。 |
LumaCorLutOut[4] |
[0, 255] |
[1, 1, 1, 1] |
基于luma的coring,此为输出节点,输出对应coring值。 |
MotionCorLutIn[4] |
[0, 255] |
[0, 64, 128, 192] |
基于motion的coring,此为输入节点,输入为luma。 |
MotionCorLutOut[4] |
[0, 255] |
[8, 8, 8, 8] |
基于motion的coring,此为输出节点,输出对应coring值。 |
MotionCorWgtLutIn[4] |
[0, 255] |
[0, 64, 128, 255] |
基于motion调整luma coring以及motion coring的权重,此为输入节点,输入motion的大小。 |
MotionCorWgtLutOut[4] |
[0, 255] |
[0, 32, 64, 128] |
基于motion调整luma coring以及motion coring 的权重,此为输出节点,输出motion co ring的权重。(max = 128) |
DeltaAdpGainEn |
[0, 1] |
0 |
锐度锐化权重始能 |
DeltaAdpGain[33] |
[0, 63] |
32 |
锐度锐化权重。 ※ 由33个数值平均分成33段锐化区,每个锐化区对应一个锐化权重。对应锐化区间的值越大,像素点锐化越强。 |
GlobalGain |
[0, 255] |
32 |
全局锐化权重。 ※该值越大,锐化程度越强。 |
OverShootGain |
[0, 255] |
4 |
白边锐化上限幅度的倍率。(1x = 16) |
UnderShootGain |
[0, 255] |
4 |
黑边锐化上限幅度的倍率。(1x = 16) |
OverShootThr |
[0, 255] |
32 |
白边锐化上限幅度。 |
UnderShootThr |
[0, 255] |
32 |
黑边锐化下限幅度。 |
OverShootThrMax |
[0, 255] |
255 |
白边锐化最大上限幅度。 |
UnderShootThrMax |
[0, 255] |
255 |
黑边锐化最大下限幅度。 |
HFBlendWgt |
[0, 255] |
128 |
高频边缘加强的权重 |
MFBlendWgt |
[0, 255] |
128 |
中频边缘加强的权重 |
NoiseSuppressEnable |
[0, 1] |
1 |
针对边缘侦测的影像做加强去噪的前处理后再做边缘增强。 |
MotionShtGainIn[4] |
[0, 255] |
[0, 64, 128, 192] |
针对motion区决定边缘增强程度的LUT,此为水平节点,输入值为motion值。 |
MotionShtGainOut[4] |
[0, 128] |
[128, 128, 128, 128] |
针对motion区决定边缘增强程度的LUT,此为垂直节点, 输出值为motion所对应的增强强度。 |
SatShtCtrlEn |
[0, 1] |
1 |
由饱和度调整边缘增强的始能。 0: 关闭 1: 使能 |
HueShtCtrl[33] |
[0, 63] |
[16, …, 16] |
基于指定的色彩做边缘增强 |
SatShtGainIn[4] |
[0, 255] |
[0, 8, 16, 192] |
基于指定的饱和度做边缘增强,此为输入节点,输入饱和度。 |
SatShtGainOut[4] |
[0, 128] |
[0, 0, 128, 128] |
基于指定的饱和度做边缘增强,此为输出节点,输出对应饱和度的边缘强度。 |
SoftClampEnable |
[0, 1] |
0 |
平滑的处理边缘加强 0: 关闭。 1: 使能。 |
SoftClampLB |
[0, 255] |
1 |
平滑处理边缘加强的上下界,设定的值越大,则边缘加强的越连续,但加强的效果也越弱。 |
SoftClampUB |
[0, 255] |
1 |
平滑处理边缘加强的上下界,设定的值越大,则边缘加强的越连续,但加强的效果也越弱。 |
5.17.1.3. 调试步骤¶
在做参数调试之前,请先确认 表 5.26 所列的模块已经完成调试,且关键参数的默认值依照 表 5.28 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
MLSC |
Tuned |
BNR |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
3DNR |
Tuned |
输入影像的噪声抑制
针对输入影像预先做去噪处理, NoiseSuppressEnable 为开启预先去噪处理模式。
Coring值的调整
Coring值可透过 LumaCorLut[4] 对于静态区的coring值做调整,而移动区的部分则是由 MotionCorLut[4] 做调整,最后再由 MotionCoringWgtLut[4] 根据移动量决定静态区coring值以及动态区coring值的组合权重。
不同频段的边缘组合
对于要加强的边缘,可细分为高频的细节区及中频的边缘信息,透过 HfBlendWg t调整高频细节的强度、透过 MfBlendWgt 调整中频边缘的强度。
边缘强度的调整
边缘强度的调整,区分为GlobalGain、DeltaGain、LumaGain、MotionGain,调适 GlobalGain ,针对整体锐化程度作增强。调适 DeltaAdpGain ,根据像素的边缘强度设置对应的锐化权重。在边缘强度够强的区域,本身锐化程度就高,可将权重设小避免图像过度锐化。在边缘强度较弱的区域则可设大权重,增强弱纹理区的锐化。调适 LumaAdpGain,依据像素的亮度设置对应的锐化权重。在低亮度区域,人眼对像素的差异较为敏感,所以锐化权重可以配置比较小。在高亮度区域,人眼对像素的差异较不敏感,锐化权重可以配置较大。调适
MotionShtGainIn[4]、MotionShtGainOut[4] 的LUT输入输出节点, MotionShtGainIn 为输入节点,代表物体移动量, MotionShtGainOut 物体移动量对应的影像边缘增强程度,可对于移动区域的边缘强度做微调,在移动较大的区域,可逐步调降边缘的强度,以提升视觉上的连续感。
振幅的控制 (Shoot Control)
边缘的振幅可透过 OverShhotGain、UnderShhotGain、OverShootThr 、 UnderShootThr、OverShootThrMax、UnderShootThrMax 调整,调降 OverShhotGain、UnderShhotGain、OverShootThr、UnderShootThr 能减少因为过度锐化而产生的白点(Over Shoot)和黑点(Under Shoot)。如 图 5.37 所示,ShootThr值越大,锐化幅度越大,但相对地,也容易在图像上发现白点和黑点。另外,可以控制 OverShootThrMax / OverShootThrMax 来限制ShootThr的最大值。
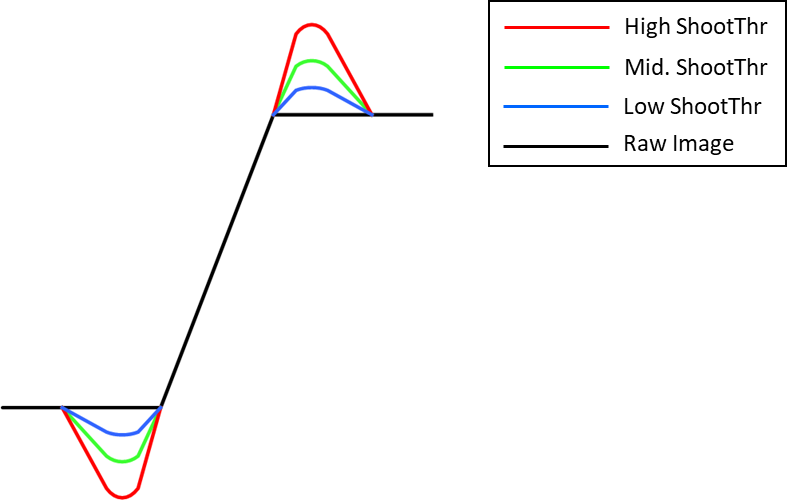
图 5.37 Shoot Control 示意图¶
5.18. 3DNR¶
5.18.1. 3DNR调试方法¶
5.18.1.1. 功能描述¶
3DNR主要是在YUV domain进行时域去噪处理。对物体的运动程度进行等级划分,根据运动强弱程度建立去噪模型。经过3DNR去噪处理后,跳动的随机噪声能够有效被抑制,画面更为干净。由于3DNR是时域上的降噪方式,在处理中会产生拖影现象,在运动物体上会加剧这种现象。关键参数的配置提供了3DNR去噪模型的运动强弱以及去噪强度的配置,同时加入了状态保护机制,用于减弱拖尾的表现。
5.18.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
1 |
3DNR模块使能: 0: 关闭。 1: 使能。 |
OpType |
OP_TYPE_AUTO, OP_TYPE_MANUAL |
OP_TYPE_AUTO |
工作类型 OP_TYPE_AUTO: 自动模式 OP_TYPE_MANUAL: 手动模式 |
TuningMode |
[0, 1] |
0 |
Motion Map 开关 : 0: 关闭 1: 开启 Motion Map画面,越亮的像素代表运动量越大,越暗的像素则代表运动量越小 |
TnrMtMode |
[0, 1] |
0 |
Motion 模式: 0: Motion IIR 1: Motion history |
YnrCnrSharpenMtMode |
[0, 1] |
1 |
Motion 模式: 0: Motion IIR 1: Motion history |
PreSharpenMtMode |
[0, 1] |
0 |
Motion 模式: 0: Motion IIR 1: Motion history |
MtDetectUnit |
[3, 5] |
3 |
运动侦测时的抗噪能力,数值越大,抗噪能力越强,但是侦测的细致度越小。 |
ChromaScalingDownMode |
[0, 3] |
0 |
chroma scaling down 0: avg 1: drop even 2: drop odd 3: drop toggle |
RNoiseLevel0/1 |
[0, 255] |
16 |
R 像素的暗部噪声容忍程度。值越大对噪声容忍程度越大,此时受噪声扰动的静态区域之移动信息较容易被判定为静止,可使3DNR降噪的效果提升。值过大会使微小移动区域被判定为静止,使3DNR降噪出现运动拖影。 RNoiseLevel0, RNoiseLevel1分别作用于WDR的长短帧。 |
GNoiseLevel0/1 |
[0, 255] |
16 |
G 像素的暗部噪声容忍程度。值越大对噪声容忍程度越大,此时受噪声扰动的静态区域之移动信息较容易被判定为静止,可使3DNR降噪的效果提升。值过大会使微小移动区域被判定为静止,使3DNR降噪出现运动拖影 GNoiseLevel0, GNoiseLevel1分别作用于WDR的长短帧。 |
BNoiseLevel0/1 |
[0, 255] |
16 |
B 像素的暗部噪声容忍程度。值越大对噪声容忍程度越大,此时受噪声扰动的静态区域之移动信息较容易被判定为静止,可使3DNR降噪的效果提升。值过大会使微小移动区域被判定为静止,使3DNR降噪出现运动拖影 BNoiseLevel0, BNoiseLevel1分别作用于WDR的长短帧。 |
RNoiseHiLevel0/1 |
[0, 255] |
16 |
R 像素的亮部噪声容忍程度。值越大对噪声容忍程度越大,此时受噪声扰动的静态区域之移动信息较容易被判定为静止,可使3DNR降噪的效果提升。值过大会使微小移动区域被判定为静止,使3DNR降噪出现运动拖影 RNoiseHiLevel0, RNoiseHiLevel1分别作用于WDR的长短帧。 |
GNoiseHiLevel0/1 |
[0, 255] |
16 |
G 像素的亮部噪声容忍程度。值越大对噪声容忍程度越大,此时受噪声扰动的静态区域之移动信息较容易被判定为静止,可使3DNR降噪的效果提升。值过大会使微小 移动区域被判定为静止,使3DNR降噪出现运动拖影 GNoiseHiLevel0, GNoiseHiLevel1分别作用于WDR的长短帧。 |
BNoiseHiLevel0/1 |
[0, 255] |
16 |
B 像素的亮部噪声容忍程度。值越大对噪声容忍程度越大,此时受噪声扰动的静态区域之移动信息较容易被判定为静止,可使3DNR降噪的效果提升。值过大会使微小移动区域被判定为静止,使3DNR降噪出现运动拖影。 BNoiseHiLevel0, BNoiseHiLevel1分别作用于WDR的长短帧。 |
BrightnessNoiseLevelLE |
[0, 1024] |
0 |
防止因灯光闪烁而造成误判为运动,数值越大越能抗灯光闪烁,但数值太大也会造成不易侦测运动物体。作用于WDR的长帧。 |
BrightnessNoiseLevelSE |
[0, 1024] |
0 |
防止因灯光闪烁而造成误判为运动,数值越大越能抗灯光闪烁,但数值太大也会造成不易侦测运动物体。作用于WDR的短帧。 |
MtLumaMode |
[0, 1] |
1 |
L2MCurve0/1中的Luma的计算方式。 0: Luma,RGB计算出的Luma值。 1: Max,RGB中的最大值。 |
L2mIn0 ~L2mIn0(L2mCurve0) |
[0,4095] |
[400, 600, 1000, 2000] |
由四个数值组成的数组。定义灰度等级,值越大灰度越高。作用于linear或者WDR的长帧。 |
L2mOut0 ~L2mOut0(L2mCurve0) |
[0,63] |
[63, 16, 16, 16] |
由四个数值组成的数组。定义运动增益,值越大对运动判断的增幅越强。作用于linear或者WDR的长帧。 |
L2mIn1 ~L2mIn1(L2mCurve1) |
[0,4095] |
[400, 600, 1000, 2000] |
由四个数值组成的数组。定义灰度等级,值越大灰度越高。作用于WDR的短帧。 |
L2mOut1 ~L2mOut1(L2mCurve1) |
[0,63] |
[63, 16, 16, 16] |
由四个数值组成的数组。定义运动增益,值越大对运动判断的增幅越强。作用于WDR的短帧。 |
MtFiltMode |
[0, 1] |
1 |
运动侦测滤波器模式。 0:低通滤波。 1:中值滤波和低通滤波blending,权重由MtFiltWgt决定,权重越大,越取中值滤波的结果。 |
MtFiltWgt |
[0, 256] |
128 |
运动侦测滤波器权重。权重越大,越取中值滤波的结果。 |
TnrStrength |
[0, 255] |
16 |
Motion Map 放大系数: 16: 1x 32: 2x 64: 4x 128: 8x 255:16x |
MapThdLow |
[0, 255] |
0 |
对Motion Map进行线性映射,线性映射0对应的值。 |
MapThdHigh |
[0, 255] |
255 |
对Motion Map进行线性映射,线性映射255对应的值。 |
MotionHistoryStr |
[0, 15] |
12 |
定义输出给YNR参考之移动轨迹保留程度。数值越高移动轨迹保留越长,反之移动轨迹保留越短。固定IIR值。 |
PrvMotion00~PrvMotion03(PrtctCurve) |
[0, 255] |
[16, 64, 128, 240] |
由四个数值组成的数组。定义运动等级,值越大运动幅度越强。根据Motion确定IIR权重。 |
PrtctWgt00 ~PrtctWgt03(PrtctCurve) |
[0, 15] |
[8, 8, 8, 8] |
由四个数值组成的数组。定义状态保护增益,参考前一帧数据对当前帧数作动静保护,值越大越参考前帧数据。根据Motion决定IIR权重。 |
LowMtLowPassEnable |
[0, 1] |
0 |
弱运动侦测使用进行低通滤波。 |
CompGainEnable |
[0, 1] |
0 |
亮度补偿功能使能。 |
LowMtPrtInY[4](LowMtPrtCurveY) |
[0, 255] |
[0, 64, 128, 255] |
定义LUT的横轴,亦即Y通道pixel为单位的前后帧差值。 |
LowMtPrtOutY[4](LowMtPrtCurveY) |
[0, 255] |
[0, 64, 128, 255] |
定义 LUT的纵轴,亦即Y通道前后帧差值的保护程度。 |
LowMtPrtInU[4](LowMtPrtCurveU) |
[0, 255] |
0 |
定义LUT的横轴,亦即U通道pixel为单位的前后帧差值。 |
LowMtPrtOutU[4](LowMtPrtCurveU) |
[0, 255] |
0 |
定义 LUT的纵轴,亦即U通道前后帧差值的保护程度。 |
LowMtPrtInV[4](LowMtPrtCurveV) |
[0, 255] |
0 |
定义LUT的横轴,亦即V通道pixel为单位的前后帧差值。 |
LowMtPrtOutV[4](LowMtPrtCurveV) |
[0, 255] |
0 |
定义 LUT 的纵轴,亦即V通道前后帧差值的保护程度。 |
AdaptNrLumaStrIn[4](AdaptNrLumaStr) |
[0, 255] |
[0, 64, 128, 255] |
定义LUT 的横轴,亦即Y通道区块为单位的前后帧差值。 |
AdaptNrLumaStrOut[4](AdaptNrLumaStr) |
[0, 255] |
[0, 64, 128, 255] |
定义 LUT 的纵轴,亦即Y通道前后帧差值的保护程度。 |
AdaptNrChromaStrIn[4](AdaptNrChromaStr) |
[0, 255] |
[0, 64, 128, 255] |
定义LUT的横轴,亦即UV通道区块为单位的前后帧差值。 |
AdaptNrChromaStrOut[4](AdaptNrChromaStr) |
[0, 255] |
[0, 64, 128, 255] |
定义 LUT 的纵轴,亦即UV通道前后帧差值的保护程度。 |
LowMtPrtAdvMode |
[0, 1] |
0 |
空域降噪微小运动模式。 |
LowMtPrtAdvIn[4](LowMtPrtAdvY) |
[0, 255] |
[8, 11, 192, 208] |
定义 LUT 的横轴,亦即区块为单位的前后帧差值。 |
LowMtPrtAdvOut[4](LowMtPrtAdvY) |
[0, 255] |
[16, 16, 16, 16] |
定义 LUT 的纵轴,亦即前后帧差值的保护增益。 |
LowMtPrtAdvLumaEnable |
[0, 1] |
0 |
空域降噪微小运动保护功能使能。该功能可根据区块为单位的前后帧差值定义保护程度,保护程度越高越倾向原像素值输出。反之,值越低越倾向时域降噪后的像素值输出。 |
LowMtPrtAdvMax |
[0, 255] |
255 |
保护增益上限。 |
LowMtPrtEn |
[0, 1] |
1 |
空域降噪微小运动保护功能使能。该功能可根据像素为单位的前后帧差值定义保护程度,保护程度越高越倾向原像素值输出。反之,值越低越倾向时域降噪后的像素值输出。 |
LowMtPrtLevelY |
[0, 255] |
255 |
Y通道保护上限值。值越高时,受保护之运动区域会越倾向原像素值输出。反之,值越低越倾向时域降噪后的像素值输出。 |
LowMtPrtLevelU |
[0, 255] |
255 |
U通道保护上限值。值越高时,受保护之运动区域会越倾向原像素值输出。反之,值越低越倾向时域降噪后的像素值输出。 |
LowMtPrtLevelV |
[0, 255] |
255 |
V通道保护上限值。值越高时,受保护之运动区域会越倾向原像素值输出。反之,值越低越倾向时域降噪后的像素值输出。 |
LowMtPrtAdvDebugMode |
[0, 1] |
0 |
调整模式,输出可视化辅助信息,帮助用户调适 0: 输出移动侦测可视化结果。 1: 根据 LowMtPrtDebugIn/Out 输出移动侦测可视化结果。进当TuningMode为1的时候有效。 |
LowMtPrtAdvDebugIn[4] |
[0, 255] |
[8, 11, 192, 208] |
调整模式,微小运动输入范围设定。 |
LowMtPrtAdvDebugOut[4] |
[0, 255] |
[8, 11, 192, 208] |
调整模式,微小运动输出范围设定。 |
5.18.1.3. 调试步骤¶
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
Noise Profile |
Set |
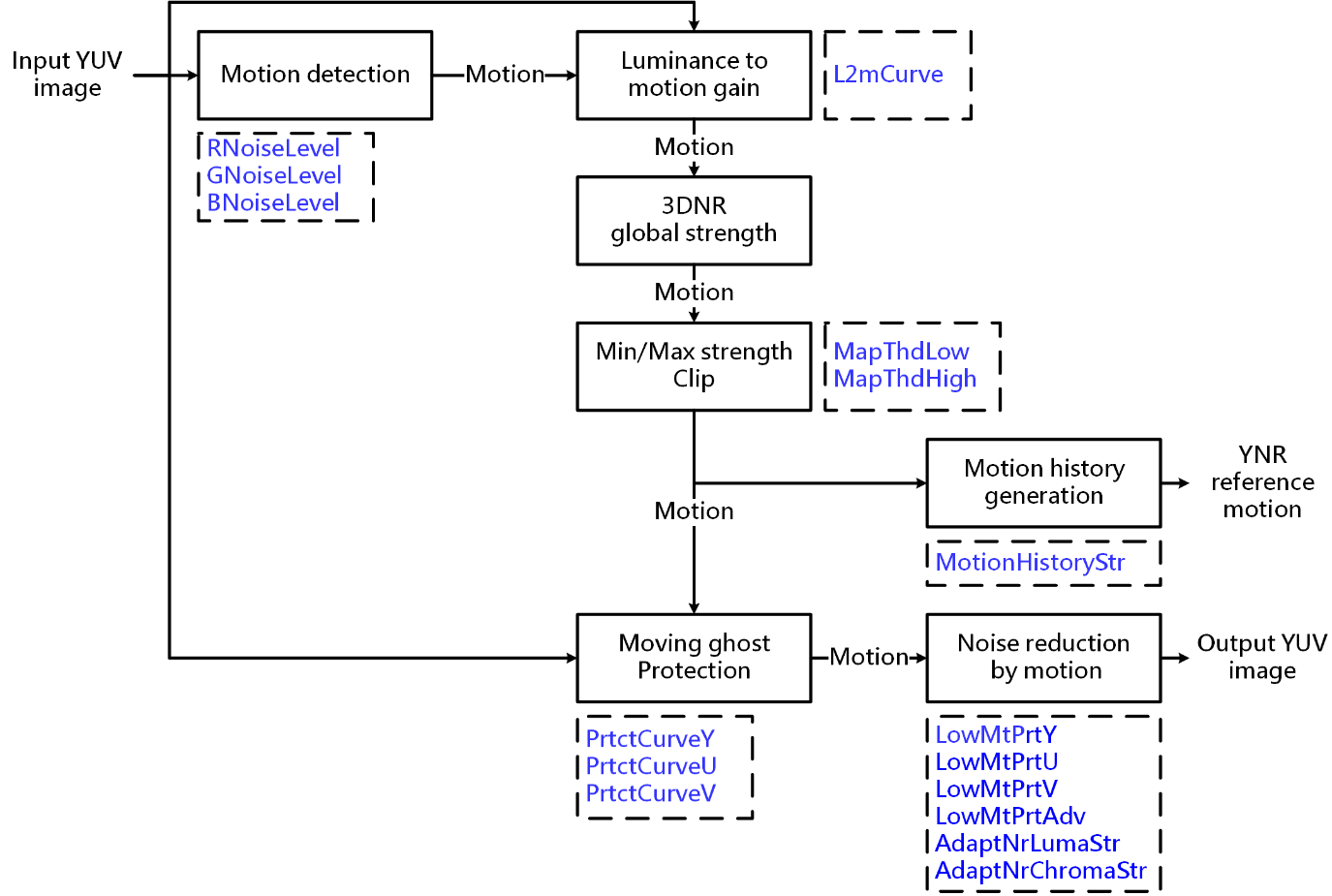
图 5.38 3DNR处理流程图及关键参数¶
步骤1. 定义噪声容忍程度。 控制 RNoiseLevel / GNoiseLevel / BNoiseLevel /RNoiseHiLevel / GNoiseHiLevel / BNoiseHiLevel 作调整,值越大对噪声容忍程度越大,此时受噪声扰动的静态区域之运动信息较容易被判定为静止,可使3DNR降噪效果提升。但也不能过度放大,因为值过大会使微小移动区域被判定为静止,而使3DNR降噪后出现移动残影。
步骤2. 定义不同灰度的运动增益。 依灰度划分四个等级,即 L2mCurve 里的 L2mIn00 / L2mIn01 / L2mIn02 / L2mIn03。第一级灰度范围定义是最暗到刚好能分辨最微弱的运动;第二级灰度范围划分给灰度差异可分辨但是分辨程度较弱区域;第三级灰度范围划分给运动较为明显的区域;第四级灰度范围则划分到最亮,具体配置可根据实际情况进行调整。
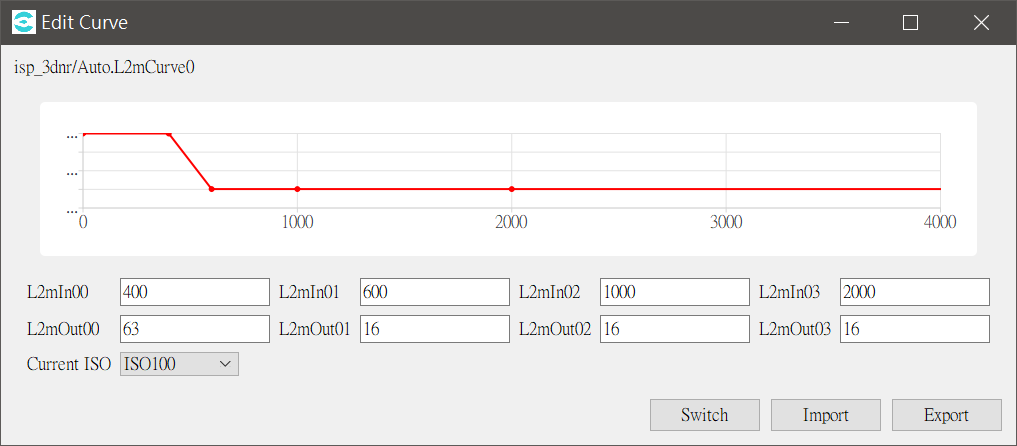
图 5.39 Luminance to motion gain降噪模型调适¶
步骤3. 定义总增益。 调节 TnrStrength 控制整体3DNR强度,数值越小可以让越多区域容易被判断为静止区,而达到3DNR效果,但也可能让运动物体被误判为静止区,而造成拖影现象;相反地,数值越大则让微小运动也容易被侦测到,但噪声可能同时也被误判为运动物体,使得整体画面较为浮动。
步骤4. 定义总增益上下限。 调节 MapThdLow / MapThdHigh 控制整体增益上下限,建议初始设定 MapThdLow =0, MapThdHigh =255,保留最原始的增益状态。若调低数值会让整体容易判别为静止区,让整体越有3DNR迭合效果,不过数值过低可能会造成严重拖影;相反地,数值越高虽然容易让整体判断为运动区,但是数值过高则会让静止区3DNR效果减弱,而在静止区会有浮动噪声。
步骤5. 建立保护模型。 调适思路与步骤2相同,依四个等级划分静止区域至运动区域。主要用于抑制背景区的跳动噪声和拖影。因此在静止区域建议将增益设高,参考更多的前帧图像数据;而在运动区域,建议将增益设低,降低前帧数据的权重。
步骤6. 建立给YNR参考的移动轨迹。 调适思路接续步骤4,依 MotionHistoryStr 强度建立移动轨迹输出给YNR参考。 MotionHistoryStr 数值越大移动轨迹可持续越长,数值越小移动轨迹可持续越短。如此,YNR可针对移动轨迹的数值大小自适应改变移动区域的去躁强度来与3DNR做搭配。
步骤7. 针对物体运动量调节去躁强度。LowMtPrtY / LowMtPrtU / LowMtPrtV / LowMtPrtAdv 主要是针对弱运动区域,依四个等级划分运动量来控制去躁强度。最后,可调节 AdaptNrLumaStr / AdaptNrChromaStr 来控制运动量的映射曲线,达到抑制噪声对运动量侦测的影响。
5.19. YNR¶
5.19.1. YNR调试方法¶
YNR (Y-domain Noise Reduction) 实现亮噪抑制功能。
5.19.1.1. 功能描述¶
YNR主要是在luma domain进行空域去噪处理。根据不同的sensor,建立符合噪声特性的去噪模型。经过YNR适当地去噪处理后,使得最后的图像结果看起来自然,且避免出现在去噪过程中一些常见的视觉瑕疵,例如虫状噪声和pattern噪声。关键参数的配置提供了调整去噪强度的弹性。在抑制噪声的同时,保留图像边缘、纹理和细节,不改变原始的噪声型态,且对随机噪声有一定的保留,因此能提高图像结果的信噪比和整体均匀度。
5.19.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
YNR模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
YNR工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
TuningMode |
[0, 15] |
8 |
8 : YNR 图像结果。 11 : 所有边缘检测结果。 12 :垂直边缘检测结果。 13 :水平边缘检测结果。 14 :45°边缘检测结果。 15 :135°边缘检测结果。 |
CoringParamEnable |
[0, 1] |
1 |
手动调节亮度噪声容忍值使能。值为0时由软件计算得到Noise Profile,值为1时由参数NoiseCoringBase和NoiseCoringAdv确定Noise Profile。 0: 关闭。 1: 使能。 |
NoiseCoringBase |
[0, 255] |
0 |
运动区亮度噪声容忍值,运动区的判断与TNR运动区侦测连动。值越大,对运动区去噪强度越大。 |
NoiseCoringAdv |
[0, 255] |
0 |
静止区亮度噪声容忍值,静止区的判断与TNR运动区侦测连动。值越大,对静止区去噪强度越大。 |
NoiseCoringMax |
[0, 255] |
255 |
噪声抑制强度可允许之最大值。限制NoiseCoringBase和NoiseCoringAdv的blending结果。 |
NoiseSuppressStr |
[0, 255] |
0 |
噪声抑制强度。值越大,亮噪去噪强度越大。128为1x。 |
WindowType |
[0, 11] |
11 |
去噪滤波局域程度。其值越小,作用越局域。 |
VarThr |
[0, 255] |
64 |
侦测边缘的阈值。值越大,判断为边缘的数量越少。 |
MotionYnrLut[16] |
[0, 255] |
[0, …, 0] |
调整在不同物体运动量时对应的去亮噪强度,将运动量区分为16阶。值越大,去亮噪强度越强。 |
FilterType |
[0, 255] |
0 |
去噪滤波器强度。值越大,亮噪去噪强度越大。 |
NonDirFiltStr |
[0, 31] |
0 |
调节在低频区的去噪强度。值越大,在低频区域去除的噪声越多。 |
VhDirFiltStr |
[0, 31] |
0 |
调节在水平和垂直区的去噪强度。值越大,在水平和垂直边缘去除的噪声越多。 |
AaDirFiltStr |
[0, 31] |
0 |
调节在对角线边缘的去噪强度。值越大,在对角线边缘去除的噪声越多。 |
DetailSmoothMode |
[0, 1] |
1 |
去噪细节平滑功能使能。 0: 关闭。 1: 使能。 |
FiltModeEnable |
[0, 1] |
0 |
滤波器手调混和模式使能。值为0时FilterMode有效,值为1时FIltMode有效。 |
FiltMode |
[0, 256] |
128 |
FiltModeEnable为1时有效。nlm和bf滤波的混合权重,值越大越偏向nlm滤波。 |
FilterMode |
[0, 1023] |
256 |
FiltModeEnable为0时有效。滤波器模式。值越小越偏向nlm滤波,平坦区保留的噪声均匀性越好。 |
CoringWgtLF |
[0, 256] |
0 |
调节在低频区域的随机噪声强度。值越大,在低频区域保留的噪声越多。VarThr为高低频区的分界。 |
CoringWgtHF |
[0, 256] |
0 |
调节在高频区域的随机噪声强度。值越大,在高频区域的保留的噪声越多。VarThr为高低频区的分界。 |
CoringWgtMax |
[0, 255] |
255 |
可允许保留噪声的最大值。对运用CoringWgtLF和CoringWgtHF后的结果限制。 |
MotionCoringWgt[16] |
[0, 256] |
[0, …, 0] |
调整在不同物体运动量时对应的噪声保留程度,将运动量区分为16阶。值越大,噪声保留越多。 |
MotionCoringWgtMax |
[0, 255] |
255 |
针对物体运动区域,可允许保留噪声的最大值。对运用MotionCoringWgt后的结果限制。 |
5.19.1.3. 调试步骤¶
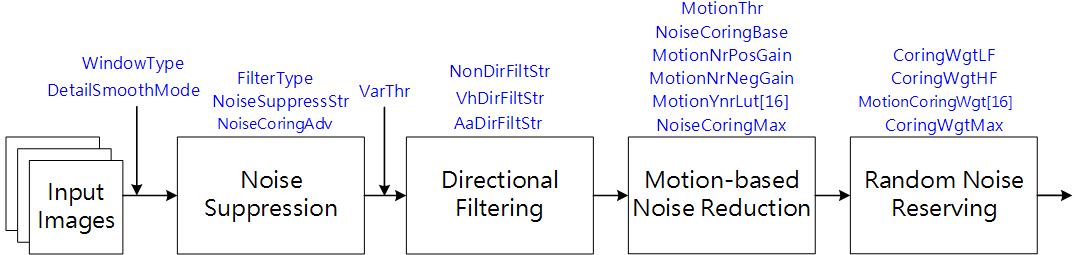
图 5.40 YNR处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.32 所列的模块已经完成调试,且关键参数的默认值依照 表 5.31 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
CCM |
Tuned |
Gamma |
Tuned |
3DNR |
Tuned |
Noise Profile |
Set |
步骤1. 调节亮度噪声去噪功能。相关参数包含噪声抑制强度 NoiseSuppressStr 和静态区噪声抑制强度 NoiseCoringAdv 以及去噪滤波器强度 FilterType ,参数会随着不同的ISO而有相对应的配置。首先,调节 NoiseSuppressStr ,使其渐渐增大,直到整体图像能在保持完整细节的前提下,使噪声达到最小。特别针对静态区,可适当地调节 NoiseCoringAdv 来降低噪声 。 接着,适当地增大 FilterType ,并同时配合其他去噪模块来调试。
调试原则: 尽可能地保持整体图像噪声的均匀性,并且避免出现冲击噪声、虫状噪声和pattern噪声。针对参数 WindowType 和 DetailSmoothMode 的配置,建议使用默认值。
步骤2. 控制 VarThr 来决定图像的低频与高频区域,接着分别调节 NonDirFiltStr 和 VhDirFiltStr / AaDirFiltStr 改变去噪强度。 NonDirFiltStr 越大,低频区域的噪声越少,而 VhDirFiltStr / AaDirFiltStr 越大,图像边缘越平顺。
调试原则: 建议 NonDirFiltStr 和 VhDirFiltStr / AaDirFiltStr 设定为相同数值,对全图均匀地去噪。若图像边缘的平顺性已经满足需求,则 NonDirFiltStr 和 VhDirFiltStr / AaDirFiltStr 设定为0。
步骤3. 参考TNR中的motion map区分图像中的运动区和静止区,针对物体移动的区域,还可适当地调节 NoiseCoringBase 来降低噪声。另外,若希望细调物体移动区域在不同运动量的去躁强度,可以使用 MotionYnrLut[16]。
调试原则: 若希望图像中物体移动区域噪声降低,建议先使用 NoiseCoringBase ,渐渐增加 NoiseCoringBase 增强去噪强度,直到与背景噪声型态相似。 另外,可依需求调整 NoiseCoringMax 设定去噪强度可允许之最大值。
步骤4. 根据步骤2得到的图像的低频与高频区域,分别通过调节参数 CoringWgtLF 和 CoringWgtHF 保留随机噪声的程度。适当地调高 CoringWgtLF 可改善虫状噪声和pattern噪声,而适当地增大 CoringWgtHF 可增加图像细节感。另外,若希望细调物体移动区域在不同运动量的噪声保留程度,可以使用 MotionCoringWgtLut[16]。
调试原则: 建议 CoringWgtLF 和 CoringWgtHF 设定为相同数值,使图像整体的噪声均匀分布。若图像没有出现上述的噪声类型, CoringWgtLF 和 CoringWgtHF 设定为0。另外,可针对整体影像和物体运动区域分别调整 CoringWgtMax 和 MotionCoringWgtMax 设定可允许保留噪声的最大值。
5.20. CNR¶
5.20.1. CNR调试方法¶
CNR (Color Noise Reduction) 实现色噪抑制功能。
5.20.1.1. 功能描述¶
CNR主要是在YUV domain进行空域去色噪处理。自适应计算图像中物体边缘的强弱,达到在抑制色噪的同时,避免物体边缘发生溢色现象。
5.20.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
CNR模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 4] |
0 |
CNR工作类型。 0: 自动模式(OP_TYPE_AUTO)。 1: 手动模式(OP_TYPE_MANUAL)。 |
NoiseSuppressStr |
[0, 255] |
0 |
色噪抑制强度。值越大,色噪去噪强度越大。 |
NoiseSuppressGain |
[1, 8] |
8 |
色噪抑制强度增益。值越大,色噪去噪强度越大。 |
MotionNrStr |
[0, 255] |
32 |
调节物体运动区域的色噪去噪强度。值越大,运动区域的色噪越少。根据motion调整diffmap。 |
CnrStr |
[0, 255] |
16 |
色噪去噪强度。值越大,色噪去噪强度越大。全局调整diffmap。 |
LumaWgt |
[0, 8] |
4 |
参考亮度的色噪去噪权重。值越大,亮度影响色噪去噪的强度越大。根据luma的diffmap调整uv的diffmap。 |
FilterType |
[0, 31] |
0 |
色噪去噪滤波器强度。值越大,色噪去除强度越大。 |
DetailSmoothMode |
[0, 1] |
0 |
去噪细节平滑功能使能。 0: 关闭。 1: 使能。 |
MotionCnrEnable |
[0, 1] |
0 |
参考物体运动量来调整去色噪强度功能使能。 0: 关闭。 1: 使能。MotionCnrCoringLut[16]和MotionCnrStrLut[16]有效。直接调整与灰阶距离去色噪。 |
MotionCnrCoringLut[16] |
[0, 255] |
使用 LUT 调整不同物体运动量时对应的色噪抑制强度,将运动量区分为16阶。值越大,色噪抑制强度越强。 |
|
MotionCnrStrLut[16] |
[0, 255] |
使用LUT调整不同物体运动量时对应的去色噪强度,将运动量区分为16阶。值越大,去色噪强度越强。 |
5.20.1.3. 调试步骤¶
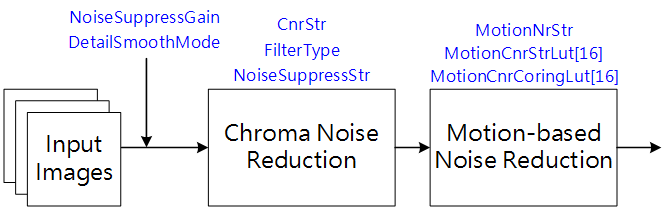
图 5.41 CNR处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.34 所列的模块已经完成调试,且关键参数的默认值依照 表 5.33 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalke Removal |
Tuned |
MLSC |
Tuned |
BNR |
Tuned |
Demosaic |
Tuned |
CCM |
Tuned |
Dehaze |
Tuned (if enabled) |
CLUT |
Tuned (if enabled) |
3DNR |
Tuned |
步骤1. 针对色噪调节去噪强度。相关参数包含色噪去噪强度 CnrStr 和色噪去噪滤波器强度 FilterType ,参数会随着不同的ISO而有相对应的配置。首先,调节参数 FilterType ,使其渐渐增大,直到图像中物体边缘在没有出现溢色的前提下,使色噪达到最小。当 FilterType 已经达到最大值,但色噪仍有待消除的时候,则可适当地增大 CnrStr 控制整体图像的去色噪强度,并且可以搭配 NoiseSuppressStr 调适。
步骤2. 调节参数 MotionNrStr 控制图像中物体运动区域的色噪大小直到与背景色噪型态相似。 MotionNrStr 数值越大,色噪去噪强度越强。另外,若希望细调物体移动区域在不同运动量的去色躁强度,可以使用 MotionCnrStrLut[16] 和 MotionCnrCoringLut[16]。
5.21. CA¶
5.21.1. CA调试方法¶
5.21.1.1. 功能描述¶
CA 模块主要在 YUV domain 做色域调整的工作,支持两种不同的模式,CA模式和CP模式。CA模式提供色度 (U, V) 的映射调整,可以根据亮度 Y 和 ISO值决定UV的增益,进而达到调整局部饱和度的目的,使得亮处的颜色更鲜艳,同时降低暗处的色噪。CP模式则是一般使用在热成像上色,而热成像本身只有亮度信息,CP模式可直接由亮度Y查找对应的一组YUV输出值。
5.21.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
CA模块使能。 0: 关闭。 1: 使能。 |
CaCpMode |
[0, 1] |
0 |
CA 模式选择: 0: CA 模式。 1: CP 模式。 |
ISORatio |
[0, 2047] |
128 |
CA模式,根据ISO值查找UV的增益。所有像素点的UV调整增益都是相同的,建议在低ISO的时候此增益可以设置大一些,而高ISO时此增益值可以设定小一些,来抑制暗区的色噪。 |
YRatioLut[256] |
[0, 2047] |
128 |
CA模式,根据亮度Y查找UV的增益。此值根据不同亮度等级可设置不同的UV增益,建议在亮区的增益可以设置大一些,颜色会较为鲜艳,而暗区的增益可以设置小一些,来抑制暗区色噪。 |
CPLutY[256] |
[0, 255] |
CP模式,根据亮度Y查找LUT对应的Y值。 |
|
CPLutU[256] |
[0, 255] |
CP模式,根据亮度Y查找LUT对应的U值。 |
|
CPLutV[256] |
[0, 255] |
CP模式,根据亮度Y查找LUT对应的V值。 |
5.21.1.3. 注意事项¶
CA模式和CP模式只能开其中一个,不能同时使用。
5.22. CAC¶
5.22.1. CAC调试方法¶
5.22.1.1. 功能描述¶
CAC (Chromatic Abberation Correction) 主要是用来消除图像中出现的紫边问题。
5.22.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
CAC模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 5] |
0 |
CAC工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
EdgeGlobalGain |
[0, 255] |
12 |
边缘侦测的强度总增益。数值越大,边缘强度越强。 |
PurpleDetRange |
[0, 128] |
96 |
紫边侦测的阈值。值越大,越多区域被判断为紫边,同时也会增强去紫边效果。 |
DePurpleStr |
[0, 255] |
30 |
去紫边强度。值越大,紫边现象越少。 |
DePurpleCbStr |
[0, 8] |
8 |
B 通道紫边校正边强度。值越大,紫边现象越少。 |
DePurpleCrStr |
[0, 8] |
8 |
R 通道紫边校正边强度。值越大,紫边现象越少。 |
DePurpleStrMaxRatio |
[0, 64] |
64 |
去紫边强度可允许之最大增益。 |
DePurpleStrMinRatio |
[0, 64] |
0 |
去紫边强度可允许之最小增益。 |
PurpleCb |
[0, 255] |
232 |
第一组自定义紫边在Cb domain的坐标。 |
PurpleCr |
[0, 255] |
157 |
第一组自定义紫边在Cr domain的坐标。 |
PurpleCb2 |
[0, 255] |
232 |
第二组自定义紫边在Cb domain的坐标。 |
PurpleCr2 |
[0, 255] |
176 |
第二组自定义紫边在Cr domain的坐标。 |
PurpleCb3 |
[0, 255] |
232 |
第三组自定义紫边在Cb domain的坐标。 |
PurpleCr3 |
[0, 255] |
176 |
第三组自定义紫边在Cr domain的坐标。 |
GreenCb |
[0, 255] |
43 |
绿色在Cb domain的坐标。 |
GreenCr |
[0, 255] |
21 |
绿色在Cr domain的坐标。 |
EdgeGainIn[3] |
[0, 16] |
[1, 2, 7] |
由二个数值组成的数组。定义边缘强度等级,值越大,边缘强度越强。 |
EdgeGainOut[3] |
[0, 32] |
[0, 4, 32] |
由二个数值组成的数组。定义边缘强度增益,值越大,输出的边缘强度越强。 |
EdgeCoring |
[0, 255] |
0 |
边缘侦测的噪声抑制控制。 |
EdgeGlobalGain |
[0, 255] |
12 |
边缘侦测的强度总增益。 |
EdgeStrMax |
[0, 255] |
255 |
边缘侦测的强度上限。 |
EdgeStrMin |
[0, 255] |
0 |
边缘侦测的强度下限。 |
TuningMode |
[0, 2] |
0 |
输出元文件案,辅助调节参数。 0: CAC图像结果。 1: 边缘侦测图像结果。 2: 紫边侦测图像结果。 |
5.22.1.3. 调试步骤¶
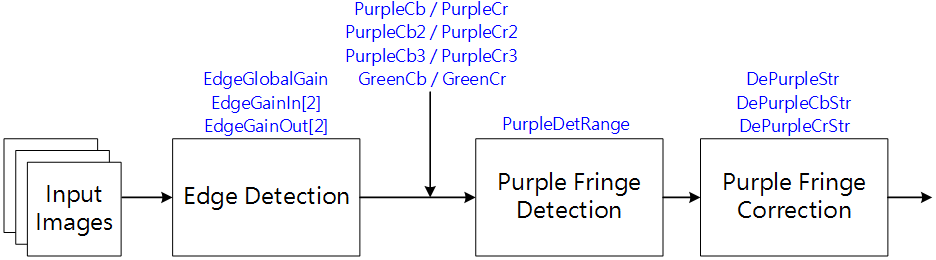
图 5.42 CAC处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.37 所列的模块已经完成调试,且关键参数的默认值依照 表 5.36 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
MLSC |
Tuned |
BNR |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
CCM |
Tuned |
Dehaze |
Tuned (if enabled) |
CLUT |
Tuned (if enabled) |
3DNR |
Tuned |
步骤1. 调节 EdgeGlobalGain 决定边缘侦测的总强度增益。若只需校正强边缘处的紫边,可以适当地调整 EdgeGainIn[2] 和 EdgeGainOut[2] ,提高强边缘对应的增益值。
步骤2. 调节 PurpleDeRange 决定被检测为紫边的范围。适当地增加 PurpleDeRange 使得高亮处有明显紫边的区域能被检测出。若发现图像中高亮处正常紫色被校正掉,则需减小 PurpleDeRange ,来保护正常的紫色区域。
步骤3. 经由上述步骤配置完的检测参数之后,可以依据需求调整 DePurpleStr 来决定紫边的校正强度。更进一步,可调适 DePurpleCbStr 和 DePurpleCrStr 来决定R和B通道的校正强度。
5.23. DCI¶
5.23.1. DCI调试方法¶
5.23.1.1. 功能描述¶
人眼视觉对于对比度比亮度更加敏感。图像在经过整个ISP pipeline处理后的结果往往造成图像对比度不足,因而减少在亮区或暗区的细节。DCI是一个基于直方图均衡的方法,可以增强整体图像的对比度,同时可调节参数保留更多的亮区和暗区细节。
5.23.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
DCI模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
DCI工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
ContrastGain |
[0, 1023] |
100 |
用来控制DCI的强度,值越大,对比度越大。 |
BlcThr |
[0, 255] |
60 |
用来决定暗区范围的门坎值。值越大,包含的暗区范围越大。 |
WhtThr |
[0, 255] |
200 |
用来决定亮区范围的门坎值。值越小,包含的亮区范围越大。 |
Method |
[0, 1] |
0 |
新旧算法切换,开启DCI推荐用新方法。 0:旧 1:新 |
BlcCtrl |
[0, 512] |
256 |
用来决定暗区的对比度。数值为256时,暗区对比度不变。比256小时,值越小,暗区对比度越大;反之,比256大时,值越大,暗区对比度越小。 |
WhtCtrl |
[0, 512] |
256 |
用来决定亮区的对比度。数值为256时,亮区对比度不变。比256小时,值越小, 亮区对比度越大;反之,比256大时,值越大,亮区对比度越小。 |
DciStrength |
[0, 255] |
0 |
控制DCI增强效果参数,数值越大整体通透度拉伸越强,反之则拉伸越弱。 |
DciGainMax |
[0, 256] |
48 |
用来控制对比度上限,数值越大,对比度可以越强。 |
Speed |
[0, 1024] |
300 |
DCI曲线时间域上变化的平顺度。数值越大,时间域变化越平顺,反之,则变化越快。 |
DciGamma |
[100, 800] |
100 |
用来控制对比度,数值越大,对比越大,但画面亮度会降低。建议搭配DciOffset 一起调适。 |
DciOffset |
[0, 255] |
0 |
整体画面亮度的调整。数值越大,整体亮度越大。建议搭配 DciGamma 一起调适。 |
TuningMode |
[0, 1] |
0 |
在同一画面同时显示原始图像和结果图像,辅助调节参数。 0: CAC图像结果。 1: 在同一画面同时显示原始图像和结果图像。 |
5.23.1.3. 调试步骤¶
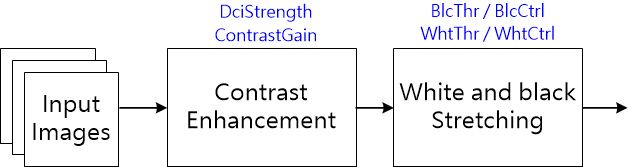
图 5.43 DCI处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.39 所列的模块已经完成调试,且关键参数的默认值依照 表 5.38 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
MLSC |
Tuned |
BNR |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
CCM |
Tuned |
Gamma |
Tuned |
Dehaze |
Tuned (if enabled) |
CLUT |
Tuned (if enabled) |
3DNR |
Tuned |
步骤1. 首先, 使用 DciStrength 调节来整体图像对比度增强的程度。值越大,整体图像的对比度越强。当 DciStrength 已经达到最大值时,但仍希望更进一步增强时,则可适当地增大 ContrastGain 控制图像对比度。
步骤2. 对比度增强后亮度提升和亮度降低的区域,可分别进一步区别控制。通过参数 WhtThr 和 BlcThr 决定亮区和暗区的范围,接着分别使用 WhtCtrl 和 BlcCtrl 控制其对比度。藉由同时增加 WhtCtrl 和 BlcCtrl 使得图像亮区越亮和暗区越暗,达到进一步增强图像的对比度。
若画面出现闪烁现象,可先关掉DCI功能,再观察确认是否仍有此现象。若有,则可以通过参数 Speed 来解决。其数值越大,DCI 在时间间域上变化的平顺度越好,画面越不会闪烁。
5.24. LDCI¶
5.24.1. LDCI调试方法¶
5.24.1.1. 功能描述¶
人眼视觉对于对比度比亮度更加敏感。图像在经过整个ISP pipeline处理后的结果往往造成图像对比度不足,因而减少在亮区或暗区的细节。LDCI是一个基于对图像分块统计的方法,增强图像的局部对比度,同时可调节滤波参数,来调整局部对比度增强的局部范围。另外,可根据输入图像的亮度进行参数调适。
5.24.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
LDCI模块使能。 0: 关闭。 1: 使能。 |
OpType |
[0, 1] |
0 |
LDCI工作类型。 0: 自动模式 (OP_TYPE_AUTO)。 1: 手动模式 (OP_TYPE_MANUAL)。 |
LdciStrength |
[0, 256] |
192 |
控制 LDCI 增强效果参数。数值越大,局部对比度拉伸越强。 |
LdciRange |
[0, 1023] |
256 |
针对图像的高频区,控制对比度增强的程度。数值越大,图像的高频区对比度越强。 |
GaussLPFSigma |
[0, 255] |
64 |
局部滤波程度,数值越小,局部对比度增强效果越局域化,反之,则越全局化。 |
LumaPosWgt
|
|
|
根据亮度控制 LDCI 作用强度,决定 LDCI 结果与原图融合的权重-亮度曲线。 |
LumaWgtMin |
[0, 255] |
0 |
LumaPosWgt下限 |
LumaWgtMax |
[0, 255] |
128 |
LumaPosWgt上限 |
VarMapMin |
[0, 255] |
0 |
VarMap下限 |
VarMapMax |
[0, 255] |
255 |
VarMap上限 |
BrightContrastHigh |
[0, 255] |
64 |
亮区的拉亮程度,值越大,亮度拉升越多。 |
BrightContrastLow |
[0, 255] |
64 |
亮区的压暗程度,值越大,亮度压暗越多。 |
DarkContrastHigh |
[0, 255] |
96 |
暗区的拉亮程度,值越大,亮度拉升越多。 |
DarkContrastLow |
[0, 255] |
96 |
暗区的压暗程度,值越大,亮度压暗越多。 |
TprCoef |
[0, 1023] |
30 |
LDCI曲线时间域上变化的平顺度。数值越小,时间域变化越平顺,反之,则变化越快。 |
5.24.1.3. 调试步骤¶

图 5.44 LDCI处理流程图及关键参数¶
在做参数调试之前,请先确认 表 5.39 所列的模块已经完成调试,且关键参数的默认值依照 表 5.38 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
MLSC |
Tuned |
BNR |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
CCM |
Tuned |
Gamma |
Tuned |
Dehaze |
Tuned (if enabled) |
CLUT |
Tuned (if enabled) |
3DNR |
Tuned |
步骤1. 首先, 使用 LdciStrength 调节图像局部对比度增强的程度。值越大,图像的局部对比度越强。
步骤2. 调节 BrightContrastHigh 和 BrightContrastLow 分别针对图像亮区增加和降低亮度的程度。调节 DarkContrastHigh 和 DarkContrastLow 分别针对图像暗区增加和降低亮度的程度。值越大,图像的局部对比度越强。
步骤3. 通过参数 GaussLPFSigma 控制滤波器的窗口大小,来决定局部对比度增强的局域程度。值越小,图像增强效果越局域化,反之,则越倾向全局化。
不同 GaussLPFSigma 参数下滤波器系数形状变化趋势图

步骤4. 针对图像的高频区,可调适 LdciRange 控制其对比度增强的程度。值越大,图像的高频区对比度增强的程度越大。
步骤5. 根据输入图像的亮度信息,可以藉由参数 Wgt 、 Sigma 和 Mean 产生权重-亮度曲线,来调整局域对比度的增强程度,决定 LDCI 结果与原图融合的比例。权重越大,越接近LDCI后的效果图。此三个参数产生的权重曲线之变化趋势如下所示。
参数 Wgt 的权重-亮度曲线变化趋势图
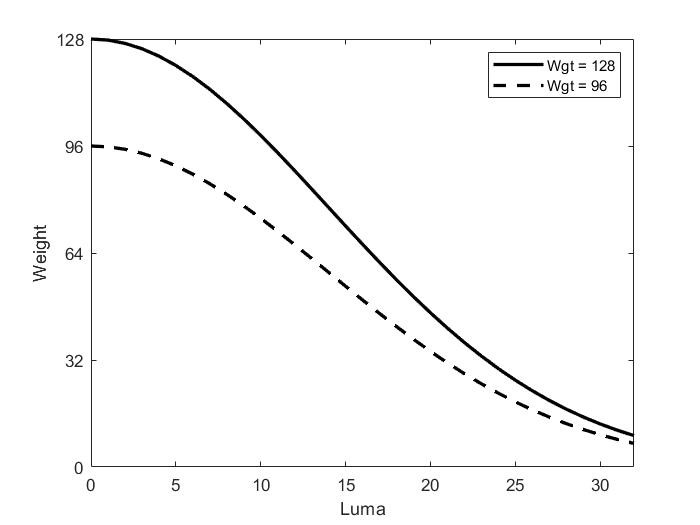
不同 Sigma 参数下权重-亮度曲线变化趋势图
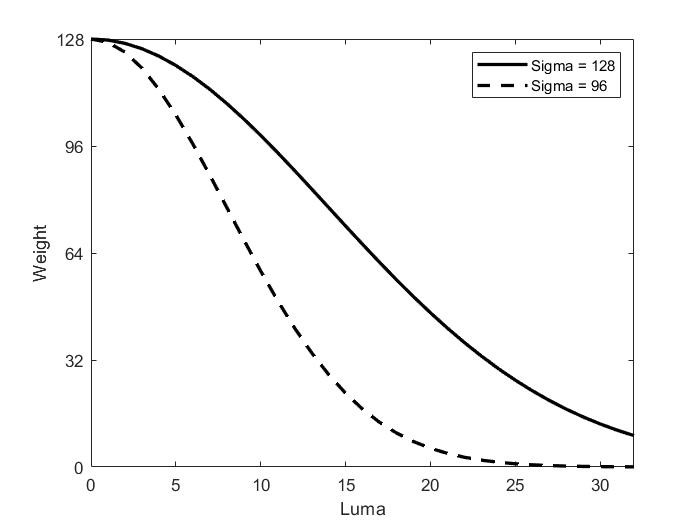
不同 Mean 参数下权重-亮度曲线变化趋势图
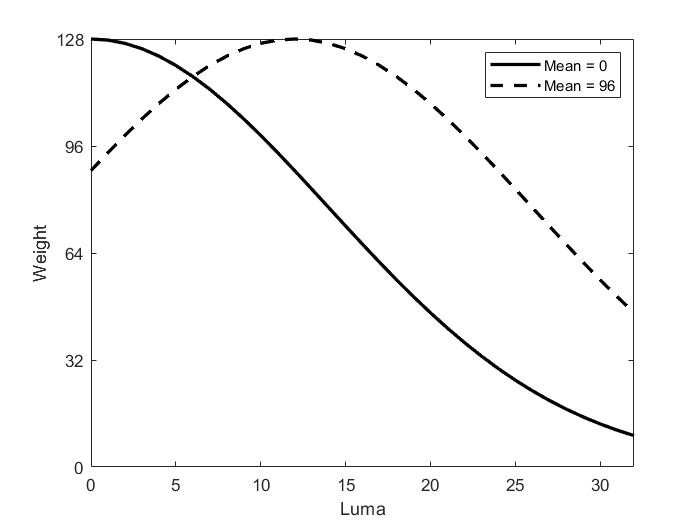
步骤6. 通过参数 TprCoef 来对LDCI的统计信息进行时域滤波,使统计信息平顺的变化。数值越小,LDCI 在时域上变化的平顺度越好。
5.25. CA_Lite¶
5.25.1. CA_Lite调试方法¶
5.25.1.1. 功能描述¶
CA_Lite模块可以根据饱和度值决定UV的增益值,进而达到调整局部饱和度的目的,尤其可用来降低图像的色噪,让视觉感受更好,也可根据使用者喜好来调适饱和度,使整体画面看起来更舒适。
5.25.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
CA_Lite模块使能。 0: 关闭。 1: 使能。 |
Ca2In[6] |
[0, 192] |
[ 4 , 8 , 1 2 , 1 8 , 3 2 , 1 9 2 ] |
由六个数值组成的数组,决定输入饱和度等级。 |
Ca2Out[6] |
[0, 2047] |
[ 1 2 8 , 1 2 8 , 1 2 8 , 1 2 8 , 1 2 8 , 1 2 8 ] |
由六个数值组成的数组,定义输出的UV增益。根据输入饱和度查找UV的增益,值越大,饱和度越高;反之,则越小。 |
5.25.1.3. 调试步骤¶
针对色彩噪声特别明显的场景或是HDR效果下过于饱和的区域,可根据需求调节参数 CA2In[6] 和 CA2Out[6] ,分别针对每个输入饱和度的范围,决定其对应的UV增益,改善整体图像的饱和度,使视觉感受更舒适。
5.26. Sharpen¶
5.26.1. Sharpen调试方法¶
5.26.1.1. 功能描述¶
Sharpen模块用于增强图像清晰度,主要用于增强图像中的大边缘。通过不同频段的多种强度组合,可以实现多种风格的清晰度增强效果,同时也提供锐化后的白边白点(Over Shoot)与黑边黑点(Under Shoot)抑制。 图 5.45 为Sharpen模块的系统框架图,黑色字体为数据流图,蓝色字体为开放调节的参数接口。

图 5.45 Sharpen模块的系统框架图¶
5.26.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
Pre-Sharpen模块使能。 0: 关闭。 1: 使能。 |
OpType |
OP_TYPE_AUTO, OP_TYPE_MANUAL |
OP_TYPE_MANUAL |
工作类型 OP_TYPE_AUTO: 自动模式 OP_TYPE_MANUAL: 手动模式 |
LumaAdpGainEn |
[0, 1] |
1 |
亮度锐化权重使能 |
LumaAdpGain[33] |
[0, 63] |
16 |
亮度锐化权重。(1x = 64) ※由33个 数值平均分成33段亮度区 ,每个亮度区对应一个亮度权重。对应亮度区间的值越小,像素点锐化越弱 |
LumaCorLutIn[4] |
[0, 255] |
[0, 64, 128, 192] |
基于luma的coring,此为输入节点,输入luma。 |
LumaCorLutOut[4] |
[0, 255] |
[1, 1, 1, 1] |
基于luma的coring,此为输出节点,输出对应coring值。 |
MotionCorLutIn[4] |
[0, 255] |
[0, 64, 128, 192] |
基于motion的coring,此为输入节点,输入为motion。 |
MotionCorLutOut[4] |
[0, 255] |
[8, 8, 8, 8] |
基于motion的coring,此为输出节点,输出对应coring值。 |
MotionCorWgtLutIn[4] |
[0, 255] |
[0, 64, 128, 255] |
基于motion调整luma coring以及motion coring的权重,此为输入节点,输入motion的大小。 |
MotionCorWgtLutOut[4] |
[0, 255] |
[0, 32, 64, 128] |
基于motion调整luma coring以及motion coring的权重,此为输出节点,输出motion coring的权重。(max = 128) |
DeltaAdpGainEn |
[0, 1] |
0 |
锐度锐化权重始能 |
DeltaAdpGain[33] |
[0, 63] |
32 |
锐度锐化权重。 ※由33个数值平均分成33段锐化区,每个锐化区对应一个锐化权重。对应锐化区间的值越大,像素点锐化越强。 |
MotionShtGainIn[4](MotionShtGainCurve) |
[0, 255] |
[0, 64, 128, 192] |
针对motion区决定边缘增强程度的LUT,此为水平节点,输入值为motion值。 |
MotionShtGainOut[4](MotionShtGainCurve) |
[0, 128] |
[128, 128, 128, 128] |
针对motion区决定边缘增强程度的LUT,此为垂直节点,输出值为motion所对应的增强强度。 |
SatShtCtrlEn |
[0, 1] |
1 |
由饱和度调整边缘增强的使能 0: 关闭 1: 使能 |
HueShtCtrl[33] |
[0, 63] |
基 于指定的色彩做边缘增强 |
|
SatShtGainIn[4] |
[0, 255] |
[0, 8, 16, 192] |
基于指定的饱和度做边缘增强,此为输入节点,输入饱和度。 |
SatShtGainOut[4] |
[0, 128] |
[0, 0, 128, 128] |
基于指定的饱和度做边缘增强,此为输出节点,输出对应饱和度的边缘强度。 |
GlobalGain |
[0, 255] |
32 |
全局锐化权重。 ※该值越大,锐化程度越强。 |
OverShootGain |
[0, 255] |
4 |
白边锐化上限幅度的倍率。(1x = 16) |
UnderShootGain |
[0, 255] |
4 |
黑边锐化上限幅度的倍率。(1x = 16) |
OverShootThr |
[0, 255] |
32 |
白边锐化上限幅度。 |
UnderShootThr |
[0, 255] |
32 |
黑边锐化下限幅度。 |
OverShootThrMax |
[0, 255] |
255 |
白边锐化最大上限幅度。 |
UnderShootThrMax |
[0, 255] |
255 |
黑边锐化最大下限幅度。 |
HFBlendWgt |
[0, 255] |
128 |
高频边缘加强的权重 |
MFBlendWgt |
[0, 255] |
128 |
中频边缘加强的权重 |
NoiseSuppressEnable |
[0, 1] |
0 |
针对边缘侦测的影像做加强去噪的前处理后再做边缘增强。 |
SoftClampEnable |
[0, 1] |
0 |
平滑的处理边缘加强 0: 关闭。 1: 使能。 |
SoftClampUB |
[0, 255] |
1 |
平滑处理边缘加强的上下界,设定的值越大,则边缘加强的越连续,但加强的效果也越弱 |
SoftClampLB |
[0, 255] |
1 |
平滑处理边缘加强的上下界,设定的值越大,则边缘加强的越连续,但加强的效果也越弱 |
5.26.1.3. 调试步骤¶
在做参数调试之前,请先确认 表 5.44 所列的模块已经完成调试,且关键参数的默认值依照 表 5.38 来配置。
模块 |
状态/数值 |
|---|---|
BLC |
Tuned |
DPC |
Tuned |
CrossTalk Removal |
Tuned |
MLSC |
Tuned |
BNR |
Tuned |
AWB |
Tuned |
Demosaic |
Tuned |
3DNR |
Tuned |
输入影像的噪声抑制
针对输入影像预先做去噪处理, NoiseSuppressEnable 为开启预先去噪处理模式。
Coring值的调整
Coring值可透过 LumaCorLut[4] 对于静态区的coring值做调整,而移动区的部分则是由 MotionCorLut[4] 做调整,最后再由 MotionCoringWgtLut[4] 根据移动量决定静态区coring值以及动态区coring值的组合权重。
不同频段的边缘组合
对于要加强的边缘,可细分为高频的细节区及中频的边缘信息,透过 HfBlendWg t调整高频细节的强度、透过 MfBlendWgt 调整中频边缘的强度。
边缘强度的调整
边缘强度的调整,区分为GlobalGain、DeltaGain、LumaGain、MotionGain,调适 GlobalGain ,针对整体锐化程度作增强。调适 DeltaAdpGain,根据像素的边缘强度设置对应的锐化权重。在边缘强度够强的区域,本身锐化程度就高,可将权重设小避免图像过度锐化。在边缘强度较弱的区域则可设大权重,增强弱纹理区的锐化。调适 LumaAdpGain,依据像素的亮度设置对应的锐化权重。在低亮度区域,人眼对像素的差异较为敏感,所以锐化权重可以配置比较小。在高亮度区域,人眼对像素的差异较不敏感,锐化权重可以配置较大。调适
MotionShtGainIn[4]、MotionShtGainOut[4] 的LUT输入输出节点, MotionShtGainIn 为输入节点,代表物体移动量, MotionShtGainOut 物体移动量对应的影像边缘增强程度,可对于移动区域的边缘强度做微调,在移动较大的区域,可逐步调降边缘的强度,以提升视觉上的连续感。
振幅的控制 (Shoot Control)
边缘的振幅可透过 OverShhotGain、UnderShhotGain、OverShootThr 、 UnderShootThr、OverShootThrMax、UnderShootThrMax 调整,调降 OverShhotGain、UnderShhotGain、OverShootThr、UnderShootThr 能减少因为过度锐化而产生的白点(Over Shoot)和黑点(Under Shoot)。如 图 5.46 所示,ShootThr值越大,锐化幅度越大,但相对地,也容易在图像上发现白点和黑点。另外,可以控制 OverShootThrMax / OverShootThrMax 来限制ShootThr的最大值。

图 5.46 Shoot Control 示意图¶
5.27. Auto Exposure¶
5.27.1. Auto Exposure调试方法¶
5.27.1.1. 功能描述¶
线性模式
AE 模块主要功能是根据图像的统计信息与设定的画面目标亮度比较 , 动态的调整画面亮度以达到预期的目标亮度 , 当画面亮度高于目标亮度时 , AE 会降低曝光量 , 反之则提高曝光量 , AE主要是透过控制曝光时间 , 曝光增益 , 以及光圈这三种方式来调整曝光量, 根据不同场景的需要 ,可设计不同的AE 曝光分配路线(route)来对应 , 例如 : 动态场景物体快速移动时 , 需要对应较短的曝光时间 , 避免物体产生运动拖影 , 在静态场景时 , 应以较长的曝光时间优先 , 可降低画面的噪声现象 , 得到较好的影像质量 。
WDR 模式
当场景的亮暗反差太大时, 由于线性模式下的 AE 只能设定一组曝光 , 因此只能顾及亮处或暗处, 无法两者兼顾 , 若是亮处曝光正常, 暗处会因太暗而无法看清细节 , 反之 , 若暗处曝光正常 , 亮处则会因一整片白而看不到细节 , 此时便需要 WDR 的多重曝光来解决此问题 ,分别对暗处做长曝及亮处做短曝 , 如此便可同时使场景中的暗处及亮处曝光正常 , 得到一个寛容度更大的影像。
AE Route
最大支持 16 个节点 , 每个节点有曝光时间 , 增益 , 光圈三个分量 , 曝光时间的单位为 us , 建议不要设的太小 , 避免 sensor 无法支持太短的曝光时间 , 节点的曝光量是曝光时间 , 增益和光圈的乘积 , 节点的曝光量是单调递增的 ,后一个节点的曝光量大于或等于前一个节点的曝光量 , 第一个节点的曝光量最小 , 最后一个节点的曝光量最大 , 相邻的节点的曝光量增加时 , 每个节点只会有一个分量增加 , 其它分量固定, 增加的分量决定该路线的分配策略。
AE RouteEx
使用方式与 Route 相同 , 但增益可分别设定模拟增益, 数字增益, ISP 数字增益 , 可由设定AERouteExValid 来决定使用 route 或是 routeEx
SmartExposure
若支持人脸侦测时 , 可使用 智能 AE 根据侦测到的人脸实行人脸测光功能
Iris
若镜头支持光圈切换功能 , AE 可根据环境亮度自动切换 Iris , 此功能目前仅支持
5.27.1.2. 关键参数¶
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Bypass |
[0, 1] |
0 |
AE 模块功能使能 , ByPass 为true 时 , AE曝光参数设置不生效 , 维持在之前的曝光参数 |
OpType |
[0, 1] |
0 |
手动曝光与自动曝光模式切换。 |
AERunInterval |
[1, 255] |
1 |
AE算法运行的侦数间隔 |
AERouteExValid |
[0, 1] |
0 |
AE 使用 routeEx 使能 |
HistStatAdjust |
[0, 1] |
0 |
AE 会根据场景亮区的统计值来自动调整曝光,适合曝光偏暗的场景使用 |
AEGainSepCfg |
[0, 1] |
0 |
WDR mode 时, 长/短侦的 gain是否分别设定 |
ExpTimeOpType |
[0, 1] |
0 |
手动曝光时间使能 |
GainType |
[0, 1] |
0 |
手动曝光的增益以 ISO num 还是以 Gain 的方式来控制 0:AE_TYPE_GAIN; 1:AE_TYPE_ISO; |
ISONumOpType |
[0, 1] |
0 |
手动曝光 ISO num使能 |
AGainOpType |
[0, 1] |
0 |
手动曝光模拟增益使能。 |
DGainOpType |
[0, 1] |
0 |
手动曝光数字增益使能 |
ISPDGainOpType |
[0,1] |
0 |
手动曝光 ISP 数字增益使能 |
ExpTime |
[0, 214 7483647] |
16384 |
手动曝光时间 , 以微秒(us) 为单位, 具体范围与 sensor 相关 |
Again |
[1024, 214 7483647] |
1024 |
手动曝光模拟增益 , 10 bits 小数精度 , 具体范围与 sensor 相关 |
DGain |
[1024, 214 7483647] |
1024 |
手动曝光数字增益 , 10 bits 小数精度 , 具体范围与 sensor 相关 |
ISPDGain |
[1024, 214 7483647] |
1024 |
手动曝光ISP数字增益 , 10 bits 小数精度 |
ISONum |
[100, 214 7483647] |
100 |
手动曝光 ISO num , 具体范围与 sensor 相关 |
ExpTimeRangeMax |
[0, 214 7483647] |
1 00000 |
自动曝光时间的最大值 , 以微秒(us)为单位,具体范围与sensor 相关 |
ExpTimeRangeMin |
[0, 214 7483647] |
10 |
自动曝光时间的最小值 , 以微秒(us)为单位,具体范围与 sensor 相关 |
ISONumRangeMax |
[100, 214 7483647] |
1280 00000 |
自动曝光 ISO Num 的最大值,具体范围与 sensor 相关 |
ISONumRangeMin |
[100, 214 7483647] |
100 |
自动曝光 ISO Num 的最小值,具体范围与 sensor 相关 |
AGainRangeMax |
[1024, 214 7483647] |
2 04800 |
自动曝光模拟增益的最大值,具体范围与 sensor 相关 |
AGainRangeMin |
[1024, 214 7483647] |
1024 |
自动曝光模拟增益的最小值,具体范围与 sensor 相关 |
DGainRangeMax |
[1024, 214 7483647] |
2 04800 |
自动曝光数字增益的最大值,具体范围与 sensor 相关 |
DGainRangeMin |
[1024, 214 7483647] |
1024 |
自动曝光模拟增益的最小值,具体范围与 sensor 相关 |
ISPDGainRangeMax |
[1024, 262144] |
32767 |
自动曝光 ISP 数字增益的最大值 |
ISPDGainRangeMin |
[1024, 262144] |
1024 |
自动曝光ISP 数字增益的最小值 |
SysGainRangeMax |
[1024, 214 7483647] |
13107 20000 |
自动曝光系统增益的最大值,具体范围与 sensor 相关 |
SysGainRangeMin |
[1024, 214 7483647] |
1024 |
自动曝光系统增益的最小值,具体范围与 sensor 相关 |
GainThreshold |
[1024, 429 4967295] |
13107 20000 |
自动降帧时的系统增益门限值,10bit小数精度 |
GridBvWeight |
[0, 100] |
0 |
AE 测光分成以block luma / bvStep 平均这 2 种 , 默认以 luma 为主 , 此参数可设定 luma 为主的测光混合 bvStep 的测光权重 , 高光优先若觉得画像太暗 , 可适当调高此参数权重 |
HighLightLumaThr |
[0, 255] |
224 |
高光优先的亮度阈值 |
HighLightBufLumaThr |
[0, 255] |
176 |
高光优先缓冲区的亮度阈值 |
LowLightLumaThr |
[0, 255] |
16 |
低光优先的亮度阈值 |
LowLightBufLumaThr |
[0, 255] |
48 |
低光优先缓冲区的亮度阈值 |
Speed |
[0, 255] |
64 |
AE 收敛速度 , 数值越大, 收敛速度越快 |
BlackSpeedBias |
[0, 65535] |
144 |
画面由暗到亮 AE 收敛速度偏差值 , 数值越大, 画面由暗到亮的速度越快 |
Tolerance |
[0, 255] |
2 |
自动曝光对画面亮度的容忍偏差 |
Compensation |
[0, 255] |
56 |
自动曝光画面的目标亮度 |
EVBias |
[0, 65535] |
1024 |
自动曝光调整的曝光量偏差值 , 10bit 小数精度 1024 表示不对自动曝光进行调整 |
AEStrategyMode |
[0, 1] |
0 |
自动曝光策略, AE_EXP_HIGHLIGHT_PRIOR : 高光优先 AE_EXP_LOWLIGHT_PRIOR : 低光优先 |
HistRatioSlope |
[0, 65535] |
128 |
高/低优光时 AE 目标亮度下降/上升的调整步幅 |
MaxHistOffset |
[0, 255] |
16 |
高/低优光时 AE 目标亮度下降/上升的最大范围 |
AEMode |
[0, 1] |
1 |
自动曝光模式 AE_MODE_SLOW_SHUTTER: 自动降帧模式 AE_MODE_FIX_FRAME_RATE: 固定帧率模式 |
Antiflicker enable |
[0, 1] |
0 |
抗闪属性 ,默认抗闪不使能 |
AntiflickerFrequency |
[0, 1] |
0 |
抗闪频率 , 抗闪属性开启后才有效 0 : 60HZ 1: 50H |
Antiflicker.Mode |
[0, 1] |
0 |
抗闪模式 : 普通抗闪模式/自动抗闪模式 |
Subflicker.enable |
[0, 1] |
0 |
亚抗闪属性设置。默认亚抗闪不使能。 |
Subflicker.lumaDiff |
[0, 255] |
0 |
抗闪程度设置 |
AEDelayAttr.BlackDelayFrame |
[0, 255] |
0 |
图像亮度小于目标亮度时间超过BlackDelayFrame帧时,AE开始调节 |
AEDelayAttr.WhiteDelayFrame |
[0, 255] |
0 |
图像亮度大于目标亮度时间超过White DelayFrame帧时,AE开始调节。 |
FSWDRMode |
[0, 1] |
0 |
FSWDR 运行模式。 默认为ISP_FSWDR_NORMAL_MODE。 注:cv180x不支持此功能 |
WDRQuick |
[0, 1] |
0 |
WDR 模式下,AE前50帧调整是否进行时域滤波 |
ISOCalCoef |
[0, 65535] |
256 |
ISO 标定系数,用于保证拍照所需DCF信息中 显示的ISO 是标准的,8bit精度 |
AdjustTargetMin |
[0, 255] |
50 |
AE 在各个环境亮度 (LV) 时的亮度收敛下限 |
AdjustTargetMax |
[0, 255] |
60 |
AE 在各个环境亮度 (LV) 时的亮度收敛上限 |
LowBinThr |
[0, 256] |
10 |
frame 的 window 统计值在此值以下时, 且累积 window数低于总 window 数 25% , frame 的测光会排除此 window |
HighBinThr |
[0, 256] |
256 |
frame 的 window 统计值在此值以上时, 且累积 window数低于总 window 数 10% , frame 的测光会排除此 window |
EnableFace AE |
[0, 1] |
0 |
人脸辨识连动 AE 测光使能 |
FaceTargetLuma |
[0, 255] |
46 |
人脸测光的目标亮度 |
FaceWeight |
[0, 100] |
80 |
人脸测光与整体环境测光的权重比例 |
WDR 模式
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
ExpRatioType |
[0, 1] |
0 |
只在多帧合成 WDR 模式下有效。 OP_TYPE_AUTO : AE 根据场景自动算出长短帧曝光比。 OP_TYPE_M ANUAL:手动设定长短侦曝光比。 |
ExpRatio |
[64, 16384] |
64 |
只在多帧合成 WDR 模式下有效 当 ExpRatioType 为 OP_TYPE_MANUAL 时 , 设定手动的长短曝曝光, 此值在 ExpRatioType 为 OP_TYPE_AUTO 时无效 6 bit 小数精度 , 0x40 表示曝光比为 1 倍 |
ExpRatioMax |
[64, 16384] |
16384 |
只在多帧合成 WDR 模式下有效 当ExpRatioType 为 OP_TYPE_AUTO 时 , 表示长短侦的最大曝光比 , 此值在 ExpRatioType 为 OP_TYPE_MANUAL 时无效 6 bit 小数精度 , 0x40 表示曝光比为 1 倍 |
ExpRatioMin |
[64, 16384] |
256 |
只在多帧合成 WDR 模式下有效。当ExpRatioType为 OP_TYPE_AUTO 时 , 表示长短侦的最小曝光比 , 此值在 ExpRatioType 为 OP_TYPE_MANUAL 时 无效, 6bit 小数精度 , 0x40 表示曝光比为 1 倍。 |
Tolerance |
[0, 255] |
6 |
只在多帧合成 WDR 模式下有效长短侦对画面亮度的容忍偏差。 |
Speed |
[0, 255] |
1024 |
只在多帧合成 WDR 模式下有效自动曝光比调节速度 , 数值越大 , 速度越快。 |
RatioBias |
[0, 65535] |
1024 |
只在多帧合成 WDR 模式下有效当ExpRatioType 为 OP_TYPE_AUTO 时 , 该值越大 , 自动曝光比越大 , 此值为 1024 时 , 表示不对自动曝光比进行调整。 |
SECompensation |
[0, 255] |
56 |
短侦的目标亮度。 |
LEAdjustTargetMin |
[0, 255] |
50 |
AE 长侦 frame 在各个环境亮度 (LV) 时的亮度收敛下限 , 建议相邻的 LV 下限的设定不要相差太大 , 避免 AE 收敛造成闪烁。 |
LEAdjustTargetMax |
[0, 255] |
60 |
AE 长侦 frame 在各个环境亮度 (LV) 时的亮度收敛上限 , 建议相邻的 LV 上限的设定不要相差太大 , 避免 AE 收敛造成闪烁。 |
SEAdjustTargetMin |
[0, 255] |
20 |
AE 短侦 frame 在各个环境亮度 (LV) 时的亮度收敛下限 , 建议相邻的 LV 下限的设定不要相差太大 , 避免 AE 收敛造成闪烁。 |
SEAdjustTargetMax |
[0, 255] |
56 |
AE 短侦 frame 在各个环境亮度 (LV) 时的亮度收敛上限 , 建议相邻的 LV 上限的设定不要相差太大 , 避免 AE 收敛造成闪烁。 |
LELowBinThr |
[0, 255] |
0 |
AE 长侦 frame 的 window 统计值在此值以下时, AE 长侦 frame 的测光会排除此 window。 |
LEHighBinThr |
[0, 255] |
246 |
AE 长侦 frame 的 window 统计值在此值以上时, 且累积 window数低于总 window 数 25% , AE 长侦 frame 的测光会排除此 window。 |
SELowBinThr |
[0, 255] |
8 |
AE 短侦 frame 的 window 统计值在此值以下时 , AE 短侦 frame 的测光会排除此 window。 |
SEHighBinThr |
[0, 255] |
246 |
AE 短侦 frame 的 window 统计值在此值以上时 , AE 短侦 frame 的测光会排除此 window。 |
FrameAvgLumaMax |
[0, 255] |
255 |
长侦平均亮度的上限值 , 长侦的曝光不会超过此上限值 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
TotalNum |
[0, 16] |
0 |
AE 曝光分配路线的节点数 |
IntTime |
[0, 4294967295] |
0 |
AE route 的分配路线,节点的曝光时间 ,单位(us) |
SysGain |
[1024, 4294967295] |
1 024 |
AE route 的分配路线 , 节点的曝光增益, 10 bits 小数精度 |
enIrisFno |
[0, 10] |
0 |
AE route 的分配路线, 节点的光圈值 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
TotalNum |
[0, 16] |
0 |
AE 曝光分配路线的节点数 |
IntTime |
[0, 4294967295] |
0 |
AE routeEx 的分配路线, 节点的曝光时间 , 单位(us) |
Again |
[1024, 4294967295] |
1 024 |
AE routeEx 的分配路线, 节点的曝光模拟增益, 10 bits 小数精度 |
Dgain |
[1024, 4294967295] |
1 024 |
AE routeEx 的分配路线, 节点的曝光数字增益, 10 bits 小数精度 |
IspDgain |
[1024, 4294967295] |
1 024 |
AE routeEx 的分配路线, 节点的曝光ISP数字增益, 10 bits 小数精度 |
enIrisFno |
[0, 10] |
0 |
节点的光圈值 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Weight |
[0, 255] |
1 |
AE 17x15 window 的测光权重值 |
Exposure Info 页面, 了解当前的AE 信息。
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
ExpTime |
[0, 4294967295] |
0 |
AE 当前的曝光时间 , 单位 : us |
ShortExpTime |
[0, 4294967295] |
0 |
WDR 模式时 , 短侦的曝光时间, 单位(us) |
LongExpTime |
[0, 4294967295] |
0 |
WDR 模式时 , 长侦的曝光时间 , 单位(us) |
WDRExpRatio |
[0, 4294967295] |
0 |
WDR 模式时 , 当前frame 的长/短侦的曝光比, 6 bits 小数精度 |
AGain |
[1024, 4294967295] |
1 024 |
AE 当前曝光的模拟增益, 10 bits 小数精度 |
DGain |
[1024, 4294967295] |
1 024 |
AE 当前曝光的数字增益, 10 bits 小数精度 |
ISPDGain |
[1024, 2147483647] |
1 024 |
AE 当前曝光的ISP数字增益 , 10 bits 小数精度 |
Exposure |
[64, 4294967295] |
64 |
当前曝光量,等于曝光时间与曝光增益的乘积,其中曝光时间的单位为曝光行数,曝光增益为6bit小数精度 |
ExposureIsMax |
[0, 1] |
0 |
0:ISP 未达到最大曝光水平; 1:ISP 达到最大曝光水平。 |
HistError |
[-32768, 32767] |
0 |
AE 当前 frame亮度与目标亮度的差值 |
AE_Hist256Value |
[0, 4294967295] |
0 |
AE 0~ 255 的 histogram 分布 |
AveLum |
[0, 255] |
0 |
AE 当前frame 的亮度 , WDR 模式时 , 表示长侦目前的 frame 亮度。 |
Fps |
[0, 4294967295] |
0 |
除100 后, 即为AE 当前的 frame rate |
LinesPer500ms |
[0, 4294967295] |
0 |
当前每500ms对应的曝光行数,可用于将曝光时间的单位由us 转换成行数 |
PirisFno |
[0, 1024] |
0 |
当前 P-Iris光圈F值对应的等效增益 |
ISO |
[100, 2147483647] |
100 |
AE 当前曝光的 ISO 值 |
ISOCalibrate |
[0, 4294967295] |
100 |
标准 ISO, 用于拍照 DCF 信息显示。 |
RefExpRatio |
[64, 16384] |
64 |
参考曝光比,用于估计当前场景的动态范围 |
FirstStableTime |
[0, 4294967295] |
0 |
首次 AE 收敛稳定的时间,单位为微秒(us) |
AERoute.TotalNum |
[0, 16] |
0 |
AE 当前的 route 节点数 |
AERoute.RouteNode |
[0, 4294967295] |
0 |
AE 当前的 route 路线 |
AERouteEx.TotalNum |
[0, 16] |
0 |
AE 当前的 routeEx 节点数 |
AERouteEx.RouteNode |
[0, 4294967295] |
0 |
AE 当前的 routeEx 路线 |
WDRShortAveLuma |
[0, 255] |
0 |
WDR mode 短侦当前 frame 的亮度 |
LEFrameAvgLuma |
[0, 255] |
0 |
WDR mode 长侦当前 frame 的平均亮度 |
SEFrameAvgLuma |
[0, 255] |
0 |
WDR mode 短侦当前 frame的平均亮度 |
LightValue |
[-32768, 32767] |
0 |
AE 评估当前的环境亮度( LV) 值 |
AGainSF |
[1024, 4294967295] |
1 024 |
AE 短侦当前曝光的模拟增益, 10 bits 小数精度 |
DGainSF |
[1024, 4294967295] |
1 024 |
AE 短侦当前曝光的数字增益, 10 bits 小数精度 |
ISPDGainSF |
[1024, 2147483647] |
1 024 |
AE 短侦当前曝光的ISP数字增益, 10 bits 小数精度 |
ISOSF |
[100, 2147483647] |
100 |
AE 短侦当前曝光的 ISO 值 |
AERouteSF.TotalNum |
[0, 16] |
0 |
AE 短侦当前的 route 节点数 |
AERouteSF.RouteNode |
[0, 4294967295] |
0 |
AE 短侦当前的 route 路线 |
AERouteSFEx.TotalNum |
[0, 16] |
0 |
AE 短侦当前的 routeEx 节点数 |
AERouteSFEx.RouteNode |
[0, 4294967295] |
0 |
AE 短侦当前的 routeEx 路线 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
智能AE 使能 |
IRMode |
[0, 1] |
0 |
是否为红外模式 |
SmartExpType |
[0, 1] |
0 |
智能AE 自动/手动模式选择 |
LumaTarget |
[0, 255] |
46 |
智能AE 目标亮度 |
ExpCoef |
[0, 65535] |
1 024 |
智能 AE 手动曝光调整的曝光系数 |
ExpCoefMax |
[0, 65535] |
4 096 |
智能 AE 曝光系数最大值 |
ExpCoefMin |
[0, 65535] |
256 |
智能 AE 曝光系数最小值 |
SmartInterval |
[1, 255] |
1 |
智能AE 运行间隔 |
SmartSpeed |
[1, 255] |
32 |
智能AE 调整速度 |
SmartDelayNum |
[1, 255] |
5 |
智能AE 延迟恢复帧数 |
Weight |
[0, 100] |
80 |
智能AE 的测光占比 |
NarrowRatio |
[0, 100] |
75 |
智能AE计算主体亮度的内缩面积比率 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
TotalNum |
[0, 16] |
0 |
AE 短侦曝光分配路线的节点数 |
IntTime |
[0, 4294967295] |
0 |
AE 短侦route的分配路线,节点的曝光时间 ,单位(us) |
SysGain |
[1024, 4294967295] |
1 024 |
AE 短侦 route 的分配路线 , 节点的曝光增益, 10 bits 小数精度 |
enIrisFno |
[0, 10] |
0 |
AE短侦 route 的分配路线,节点的光圈值 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
TotalNum |
[0, 16] |
0 |
AE 短侦曝光分配路线的节点数 |
IntTime |
[0, 4294967295] |
0 |
AE 短侦routeEx 的分配路线, 节点的曝光时间 , 单位(us) |
Again |
[1024, 4294967295] |
1 024 |
AE 短侦routeEx 的分配路线, 节点的曝光模拟增益, 10 bits 小数精度 |
Dgain |
[1024, 4294967295] |
1 024 |
AE 短侦routeEx 的分配路线, 节点的曝光数字增益, 10 bits 小数精度 |
IspDgain |
[1024, 4294967295] |
1 024 |
AE 短侦routeEx 的分配路线, 节点的曝光ISP数字增益, 10 bits 小数精度 |
enIrisFno |
[0, 10] |
0 |
短侦节点的光圈值 |
参数 |
数值范围 |
默认值 |
描述 |
|---|---|---|---|
Enable |
[0, 1] |
0 |
自动光圈使能 |
OpType |
[0, 1] |
0 |
自动光圈或手动光圈模式选择 |
IrisType |
[0, 1] |
0 |
光圈类型,DC-Iris或P-Iris |
IrisStatus |
[0, 255] |
46 |
光圈状态 |
HoldValue |
[0, 65535] |
1 024 |
光圈校正值,用于DC-Iris 的调试 |
IrisFNO |
[0, 65535] |
4 096 |
手动光圈大小,根据光圈F值进行区分,仅支持P-Iris,不支持DC-Iris。 |
Kp |
[0, 65535] |
256 |
比例增益,用于调节光圈的开关速度,该值越大光圈打开和关闭的速度越快 |
Ki |
[1, 255] |
1 |
积分增益,用于调节光圈的开关速度,该值越大光圈打开和关闭的速度越快 |
Kd |
[1, 255] |
32 |
微分增益,用于限制光线剧烈变化时光圈的开关速度,该值越大光线剧烈变化时光圈打开和关闭的速度越慢 |
MinPwmDuty |
[1, 255] |
5 |
最小PWM占空比。该值越小过曝时光圈关闭速度越快 |
MaxPwmDuty |
[0, 100] |
80 |
最大PWM占空比。该值越大画面全黑时光圈打开速度越快 |
OpenPwmDuty |
[0, 100] |
75 |
光圈打开时的PWM占空比 |
5.27.1.3. 调试步骤¶
步骤1. 根据场景的应用 , 可依测光感兴趣的区域设定测光的权重, 一般而言, 画面的中央区域会是比较关注的区域 , 可将画面中央的测光权重高于外围区域。
步骤2. 根据场景的应用 , 设定所需的 AE route, 决定测光时快门时间及增益的分配路线, 有快速移运物体需求的场景 , 曝光时间设定不要太长, 避免产生运动拖影 , 若在意噪声表现 , 在低亮度时, 可优先使用较长的曝光时间后再提高增益。
步骤3. 根据不同的环境亮度(LV), 设定AE 的目标亮度及选择高/低光优先, 若在意亮部的细节 , 应使用高光优先避免亮区过曝 , 逆光场景时 , 则可选择低光优先 , 可提高暗部的表现避免人物过暗 。
步骤4. 若画面有周期性之闪烁现象 , 可开启抗闪功能 , 并选择适宜的抗闪频率来减轻闪烁现象 ,但若曝光时间太短(60HZ : 短于8333us , 50Hz : 短于10000us) , 即使抗闪功能开启, 仍不能避免闪烁情况。
步骤5. 可根据环境亮度 , 自定义想要长,短侦 AE收敛亮度的上,下限 , 在白天户外的场景 , 上,限可设定高一点 , 在夜晚的场景, 上, 下限可设定低一点 , 建议相邻的 LV 之间, 上,下限的区间不要相差太多 , 避免 AE 收敛造成闪烁 , 设定的上,下限区间的范围 , 会影响AE自动调整收敛亮度的结果(长侦暗部拉亮, 短侦亮部拉暗) , 设定的区间越小 , AE 能够调整的范围会越小。
—-结束