4. Compile the Torch Model
This chapter takes yolov5s.pt as an example to introduce how to compile and transfer an pytorch model to run on the BM1684X TPU platform.
This chapter requires the following files (where xxxx corresponds to the actual version information):
tpu-mlir_xxxx.tar.gz (The release package of tpu-mlir)
4.1. Load tpu-mlir
The following operations need to be in a Docker container. For the use of Docker, please refer to Setup Docker Container.
1$ tar zxf tpu-mlir_xxxx.tar.gz
2$ source tpu-mlir_xxxx/envsetup.sh
envsetup.sh adds the following environment variables:
Name |
Value |
Explanation |
|---|---|---|
TPUC_ROOT |
tpu-mlir_xxx |
The location of the SDK package after decompression |
MODEL_ZOO_PATH |
${TPUC_ROOT}/../model-zoo |
The location of the model-zoo folder, at the same level as the SDK |
envsetup.sh modifies the environment variables as follows:
1export PATH=${TPUC_ROOT}/bin:$PATH
2export PATH=${TPUC_ROOT}/python/tools:$PATH
3export PATH=${TPUC_ROOT}/python/utils:$PATH
4export PATH=${TPUC_ROOT}/python/test:$PATH
5export PATH=${TPUC_ROOT}/python/samples:$PATH
6export LD_LIBRARY_PATH=$TPUC_ROOT/lib:$LD_LIBRARY_PATH
7export PYTHONPATH=${TPUC_ROOT}/python:$PYTHONPATH
8export MODEL_ZOO_PATH=${TPUC_ROOT}/../model-zoo
9export REGRESSION_PATH=${TPUC_ROOT}/regression
4.2. Prepare working directory
Create a model_yolov5s_pt directory, note that it is the same level directory as tpu-mlir; and put both model files and image files
into the model_yolov5s_pt directory.
The operation is as follows:
1$ mkdir yolov5s_torch && cd yolov5s_torch
2$ cp $TPUC_ROOT/regression/model/yolov5s.pt .
3$ cp -rf $TPUC_ROOT/regression/dataset/COCO2017 .
4$ cp -rf $TPUC_ROOT/regression/image .
5$ mkdir workspace && cd workspace
$TPUC_ROOT is an environment variable, corresponding to the tpu-mlir_xxxx directory.
4.3. TORCH to MLIR
The model in this example has a RGB input with mean and scale of 0.0,0.0,0.0 and 0.0039216,0.0039216,0.0039216 respectively.
The model conversion command:
$ model_transform.py \
--model_name yolov5s_pt \
--model_def ../yolov5s.pt \
--input_shapes [[1,3,640,640]] \
--mean 0.0,0.0,0.0 \
--scale 0.0039216,0.0039216,0.0039216 \
--keep_aspect_ratio \
--pixel_format rgb \
--test_input ../image/dog.jpg \
--test_result yolov5s_pt_top_outputs.npz \
--mlir yolov5s_pt.mlir
After converting to mlir file, a ${model_name}_in_f32.npz file will be generated, which is the input file of the model.
4.4. MLIR to F16 bmodel
Convert the mlir file to the bmodel of f16, the operation method is as follows:
$ model_deploy.py \
--mlir yolov5s_pt.mlir \
--quantize F16 \
--chip bm1684x \
--test_input yolov5s_pt_in_f32.npz \
--test_reference yolov5s_pt_top_outputs.npz \
--tolerance 0.99,0.99 \
--model yolov5s_pt_1684x_f16.bmodel
After comiplation, a file named yolov5s_pt_1684x_f16.bmodel will be generated.
4.5. MLIR to INT8 bmodel
4.5.1. Calibration table generation
Before converting to the INT8 model, you need to run calibration to get the calibration table. Here is an example of the existing 100 images from COCO2017 to perform calibration:
$ run_calibration.py yolov5s_pt.mlir \
--dataset ../COCO2017 \
--input_num 100 \
-o yolov5s_pt_cali_table
After running the command above, a file named yolov5s_pt_cali_table will be generated, which is used as the input file for subsequent compilation of the INT8 model.
4.5.2. Compile to INT8 symmetric quantized model
Execute the following command to convert to the INT8 symmetric quantized model:
$ model_deploy.py \
--mlir yolov5s_pt.mlir \
--quantize INT8 \
--calibration_table yolov5s_pt_cali_table \
--chip bm1684x \
--test_input yolov5s_pt_in_f32.npz \
--test_reference yolov5s_pt_top_outputs.npz \
--tolerance 0.85,0.45 \
--model yolov5s_pt_1684x_int8_sym.bmodel
After compilation, a file named yolov5s_pt_1684x_int8_sym.bmodel will be generated.
4.6. Effect comparison
Use the source code under the $TPUC_ROOT/python/samples/detect_yolov5.py path to perform object detection on the image.
Use the following codes to verify the execution results of pytorch/ f16/ int8 respectively.
The pytorch model is run as follows to get dog_torch.jpg:
$ detect_yolov5.py \
--input ../image/dog.jpg \
--model ../yolov5s.pt \
--output dog_torch.jpg
The f16 bmodel is run as follows to get dog_f16.jpg :
$ detect_yolov5.py \
--input ../image/dog.jpg \
--model yolov5s_pt_1684x_f16.bmodel \
--output dog_f16.jpg
The int8 asymmetric bmodel is run as follows to get dog_int8_sym.jpg :
$ detect_yolov5.py \
--input ../image/dog.jpg \
--model yolov5s_pt_1684x_int8_sym.bmodel \
--output dog_int8_sym.jpg
The result images are compared as shown in the figure (Comparison of TPU-MLIR for YOLOv5s compilation effect).
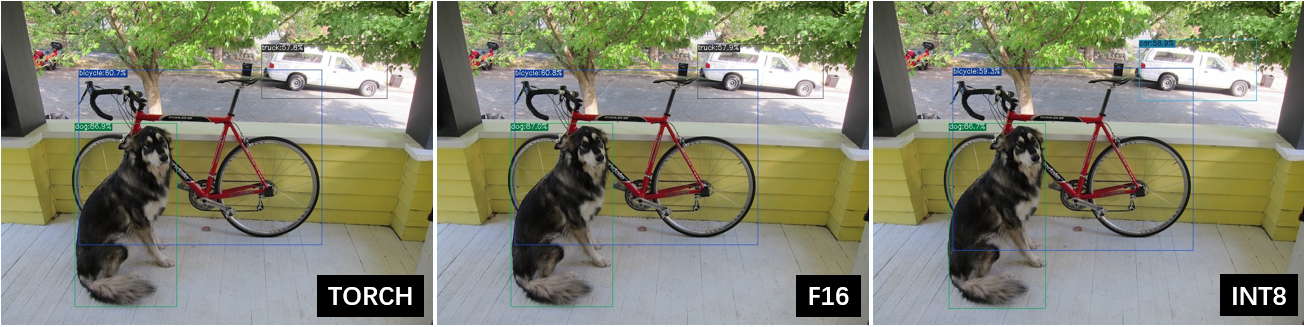
Fig. 4.1 Comparison of TPU-MLIR for YOLOv5s compilation effect
Due to different operating environments, the final performance will be somewhat different from Fig. 4.1.