3. 编译ONNX模型
本章以 yolov5s.onnx 为例, 介绍如何编译迁移一个onnx模型至TPU平台运行。
该模型来自yolov5的官网: https://github.com/ultralytics/yolov5/releases/download/v6.0/yolov5s.onnx
本章需要如下文件(其中xxxx对应实际的版本信息):
tpu-mlir_xxxx.tar.gz (tpu-mlir的发布包)
平台 |
文件名 |
说明 |
|---|---|---|
cv183x/cv182x/cv181x/cv180x |
xxx.cvimodel |
请参考: CV18xx芯片使用指南 |
其它 |
xxx.bmodel |
3.1. 加载tpu-mlir
以下操作需要在Docker容器中。关于Docker的使用, 请参考 启动Docker Container 。
1$ tar zxf tpu-mlir_xxxx.tar.gz
2$ source tpu-mlir_xxxx/envsetup.sh
envsetup.sh 会添加以下环境变量:
变量名 |
值 |
说明 |
|---|---|---|
TPUC_ROOT |
tpu-mlir_xxx |
解压后SDK包的位置 |
MODEL_ZOO_PATH |
${TPUC_ROOT}/../model-zoo |
model-zoo文件夹位置, 与SDK在同一级目录 |
REGRESSION_PATH |
${TPUC_ROOT}/regression |
regression文件夹的位置 |
envsetup.sh 对环境变量的修改内容为:
1 export PATH=${TPUC_ROOT}/bin:$PATH
2 export PATH=${TPUC_ROOT}/python/tools:$PATH
3 export PATH=${TPUC_ROOT}/python/utils:$PATH
4 export PATH=${TPUC_ROOT}/python/test:$PATH
5 export PATH=${TPUC_ROOT}/python/samples:$PATH
6 export PATH=${TPUC_ROOT}/customlayer/python:$PATH
7 export LD_LIBRARY_PATH=$TPUC_ROOT/lib:$LD_LIBRARY_PATH
8 export PYTHONPATH=${TPUC_ROOT}/python:$PYTHONPATH
9 export PYTHONPATH=${TPUC_ROOT}/customlayer/python:$PYTHONPATH
10 export MODEL_ZOO_PATH=${TPUC_ROOT}/../model-zoo
11 export REGRESSION_PATH=${TPUC_ROOT}/regression
3.2. 准备工作目录
建立 model_yolov5s 目录, 注意是与tpu-mlir同级目录; 并把模型文件和图片文件都
放入 model_yolov5s 目录中。
操作如下:
1$ mkdir model_yolov5s && cd model_yolov5s
2$ wget https://github.com/ultralytics/yolov5/releases/download/v6.0/yolov5s.onnx
3$ cp -rf $TPUC_ROOT/regression/dataset/COCO2017 .
4$ cp -rf $TPUC_ROOT/regression/image .
5$ mkdir workspace && cd workspace
这里的 $TPUC_ROOT 是环境变量, 对应tpu-mlir_xxxx目录。
3.3. ONNX转MLIR
如果模型是图片输入, 在转模型之前我们需要了解模型的预处理。如果模型用预处理后的npz文件做输入, 则不需要考虑预处理。 预处理过程用公式表达如下( \(x\) 代表输入):
官网yolov5的图片是rgb, 每个值会乘以 1/255 , 转换成mean和scale对应为
0.0,0.0,0.0 和 0.0039216,0.0039216,0.0039216 。
模型转换命令如下:
$ model_transform.py \
--model_name yolov5s \
--model_def ../yolov5s.onnx \
--input_shapes [[1,3,640,640]] \
--mean 0.0,0.0,0.0 \
--scale 0.0039216,0.0039216,0.0039216 \
--keep_aspect_ratio \
--pixel_format rgb \
--output_names 350,498,646 \
--test_input ../image/dog.jpg \
--test_result yolov5s_top_outputs.npz \
--mlir yolov5s.mlir
model_transform.py 主要参数说明如下(完整介绍请参见TPU-MLIR开发参考手册用户界面章节):
参数名 |
必选? |
说明 |
|---|---|---|
model_name |
是 |
指定模型名称 |
model_def |
是 |
指定模型定义文件, 比如`.onnx`或`.tflite`或`.prototxt`文件 |
input_shapes |
否 |
指定输入的shape, 例如[[1,3,640,640]]; 二维数组, 可以支持多输入情况 |
input_types |
否 |
指定输入的类型, 例如int32; 多输入用,隔开; 不指定情况下默认处理为float32 |
resize_dims |
否 |
原始图片需要resize之后的尺寸; 如果不指定, 则resize成模型的输入尺寸 |
keep_aspect_ratio |
否 |
在Resize时是否保持长宽比, 默认为false; 设置时会对不足部分补0 |
mean |
否 |
图像每个通道的均值, 默认为0.0,0.0,0.0 |
scale |
否 |
图片每个通道的比值, 默认为1.0,1.0,1.0 |
pixel_format |
否 |
图片类型, 可以是rgb、bgr、gray、rgbd四种情况, 默认为bgr |
channel_format |
否 |
通道类型, 对于图片输入可以是nhwc或nchw, 非图片输入则为none, 默认为nchw |
output_names |
否 |
指定输出的名称, 如果不指定, 则用模型的输出; 指定后用该指定名称做输出 |
test_input |
否 |
指定输入文件用于验证, 可以是图片或npy或npz; 可以不指定, 则不会正确性验证 |
test_result |
否 |
指定验证后的输出文件 |
excepts |
否 |
指定需要排除验证的网络层的名称, 多个用,隔开 |
mlir |
是 |
指定输出的mlir文件名称和路径 |
转成mlir文件后, 会生成一个 ${model_name}_in_f32.npz 文件, 该文件是模型的输入文件。
3.4. MLIR转F16模型
将mlir文件转换成f16的bmodel, 操作方法如下:
$ model_deploy.py \
--mlir yolov5s.mlir \
--quantize F16 \
--chip bm1684x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--model yolov5s_1684x_f16.bmodel
model_deploy.py 的主要参数说明如下(完整介绍请参见TPU-MLIR开发参考手册用户界面章节):
参数名 |
必选? |
说明 |
|---|---|---|
mlir |
是 |
指定mlir文件 |
quantize |
是 |
指定默认量化类型, 支持F32/F16/BF16/INT8 |
chip |
是 |
指定模型将要用到的平台, 支持bm1684x/bm1684/cv183x/cv182x/cv181x/cv180x |
calibration_table |
否 |
指定校准表路径, 当存在INT8量化的时候需要校准表 |
tolerance |
否 |
表示 MLIR 量化后的结果与 MLIR fp32推理结果相似度的误差容忍度 |
test_input |
否 |
指定输入文件用于验证, 可以是图片或npy或npz; 可以不指定, 则不会正确性验证 |
test_reference |
否 |
用于验证模型正确性的参考数据(使用npz格式)。其为各算子的计算结果 |
compare_all |
否 |
验证正确性时是否比较所有中间结果, 默认不比较中间结果 |
excepts |
否 |
指定需要排除验证的网络层的名称, 多个用,隔开 |
model |
是 |
指定输出的model文件名称和路径 |
编译完成后, 会生成名为 yolov5s_1684x_f16.bmodel 的文件。
3.5. MLIR转INT8模型
3.5.1. 生成校准表
转INT8模型前需要跑calibration, 得到校准表; 输入数据的数量根据情况准备100~1000张左右。
然后用校准表, 生成对称或非对称bmodel。如果对称符合需求, 一般不建议用非对称, 因为 非对称的性能会略差于对称模型。
这里用现有的100张来自COCO2017的图片举例, 执行calibration:
$ run_calibration.py yolov5s.mlir \
--dataset ../COCO2017 \
--input_num 100 \
-o yolov5s_cali_table
运行完成后会生成名为 yolov5s_cali_table 的文件, 该文件用于后续编译INT8
模型的输入文件。
3.5.2. 编译为INT8对称量化模型
转成INT8对称量化模型, 执行如下命令:
$ model_deploy.py \
--mlir yolov5s.mlir \
--quantize INT8 \
--calibration_table yolov5s_cali_table \
--chip bm1684x \
--test_input yolov5s_in_f32.npz \
--test_reference yolov5s_top_outputs.npz \
--tolerance 0.85,0.45 \
--model yolov5s_1684x_int8_sym.bmodel
编译完成后, 会生成名为 yolov5s_1684x_int8_sym.bmodel 的文件。
3.6. 效果对比
在本发布包中有用python写好的yolov5用例, 源码路径
$TPUC_ROOT/python/samples/detect_yolov5.py , 用于对图片进行目标检测。阅读该
代码可以了解模型是如何使用的: 先预处理得到模型的输入, 然后推理得到输出, 最后做后处理。
用以下代码分别来验证onnx/f16/int8的执行结果。
onnx模型的执行方式如下, 得到 dog_onnx.jpg :
$ detect_yolov5.py \
--input ../image/dog.jpg \
--model ../yolov5s.onnx \
--output dog_onnx.jpg
f16 bmodel的执行方式如下, 得到 dog_f16.jpg :
$ detect_yolov5.py \
--input ../image/dog.jpg \
--model yolov5s_1684x_f16.bmodel \
--output dog_f16.jpg
int8对称bmodel的执行方式如下, 得到 dog_int8_sym.jpg :
$ detect_yolov5.py \
--input ../image/dog.jpg \
--model yolov5s_1684x_int8_sym.bmodel \
--output dog_int8_sym.jpg
对比结果如下:
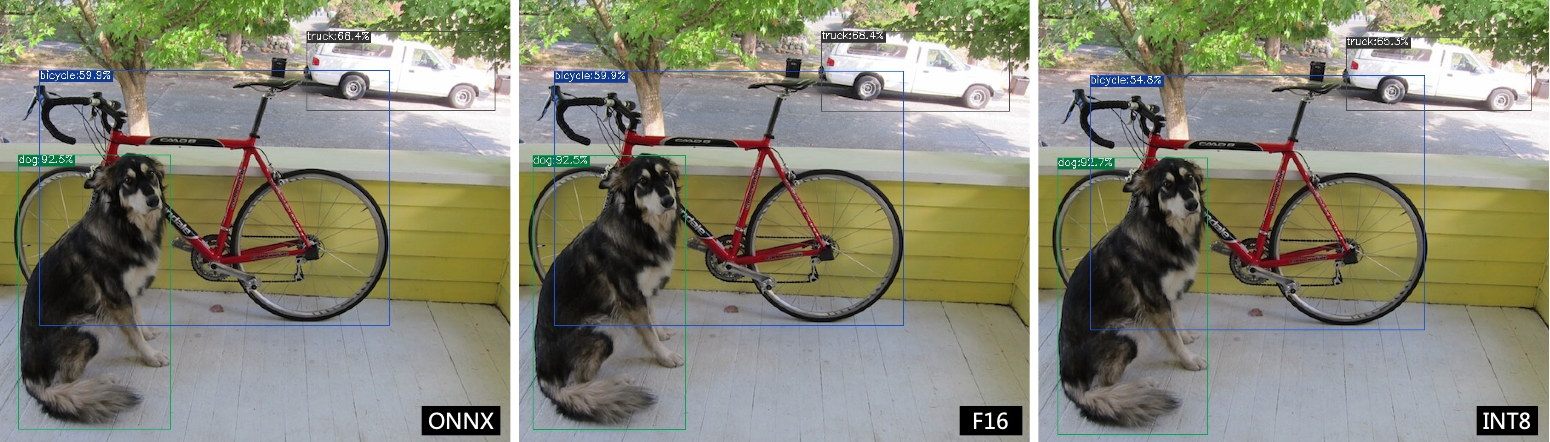
图 3.1 TPU-MLIR对YOLOv5s编译效果对比
由于运行环境不同, 最终的效果和精度与 图 3.1 会有些差异。
3.7. 模型性能测试
以下操作需要在Docker外执行,
3.7.1. 安装 libsophon 环境
请参考 libsophon 使用手册安装 libsophon 。
3.7.2. 检查 BModel 的性能
安装好 libsophon 后, 可以使用 bmrt_test 来测试编译出的 bmodel 的正确
性及性能。可以根据 bmrt_test 输出的性能结果, 来估算模型最大的fps, 来选择合适的模型。
# 下面测试上面编译出的bmodel
# --bmodel参数后面接bmodel文件,
$ cd $TPUC_ROOT/../model_yolov5s/workspace
$ bmrt_test --bmodel yolov5s_1684x_f16.bmodel
$ bmrt_test --bmodel yolov5s_1684x_int8_sym.bmodel
以最后一个命令输出为例(此处对日志做了部分截断处理):
1[BMRT][load_bmodel:983] INFO:pre net num: 0, load net num: 1
2[BMRT][show_net_info:1358] INFO: ########################
3[BMRT][show_net_info:1359] INFO: NetName: yolov5s, Index=0
4[BMRT][show_net_info:1361] INFO: ---- stage 0 ----
5[BMRT][show_net_info:1369] INFO: Input 0) 'images' shape=[ 1 3 640 640 ] dtype=FLOAT32
6[BMRT][show_net_info:1378] INFO: Output 0) '350_Transpose_f32' shape=[ 1 3 80 80 85 ] ...
7[BMRT][show_net_info:1378] INFO: Output 1) '498_Transpose_f32' shape=[ 1 3 40 40 85 ] ...
8[BMRT][show_net_info:1378] INFO: Output 2) '646_Transpose_f32' shape=[ 1 3 20 20 85 ] ...
9[BMRT][show_net_info:1381] INFO: ########################
10[BMRT][bmrt_test:770] INFO:==> running network #0, name: yolov5s, loop: 0
11[BMRT][bmrt_test:834] INFO:reading input #0, bytesize=4915200
12[BMRT][print_array:702] INFO: --> input_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 ...
13[BMRT][bmrt_test:982] INFO:reading output #0, bytesize=6528000
14[BMRT][print_array:702] INFO: --> output ref_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0...
15[BMRT][bmrt_test:982] INFO:reading output #1, bytesize=1632000
16[BMRT][print_array:702] INFO: --> output ref_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0...
17[BMRT][bmrt_test:982] INFO:reading output #2, bytesize=408000
18[BMRT][print_array:702] INFO: --> output ref_data: < 0 0 0 0 0 0 0 0 0 0 0 0 0 0...
19[BMRT][bmrt_test:1014] INFO:net[yolov5s] stage[0], launch total time is 4122 us (npu 4009 us, cpu 113 us)
20[BMRT][bmrt_test:1017] INFO:+++ The network[yolov5s] stage[0] output_data +++
21[BMRT][print_array:702] INFO:output data #0 shape: [1 3 80 80 85 ] < 0.301003 ...
22[BMRT][print_array:702] INFO:output data #1 shape: [1 3 40 40 85 ] < 0 0.228689 ...
23[BMRT][print_array:702] INFO:output data #2 shape: [1 3 20 20 85 ] < 1.00135 ...
24[BMRT][bmrt_test:1058] INFO:load input time(s): 0.008914
25[BMRT][bmrt_test:1059] INFO:calculate time(s): 0.004132
26[BMRT][bmrt_test:1060] INFO:get output time(s): 0.012603
27[BMRT][bmrt_test:1061] INFO:compare time(s): 0.006514
从上面输出可以看到以下信息:
05-08行是bmodel的网络输入输出信息
19行是在TPU上运行的时间, 其中TPU用时4009us, CPU用时113us。这里CPU用时主要是指在HOST端调用等待时间
24行是加载数据到NPU的DDR的时间
25行相当于19行的总时间
26行是输出数据取回时间