12. 附录03:BM168x测试指南
12.1. 配置系统环境
如果是首次使用Docker, 那么请使用 开发环境配置 中的方法安装
并配置Docker。同时, 本章中会使用到 git-lfs , 如果首次使用 git-lfs 可执行下述命
令进行安装和配置(仅首次执行, 同时该配置是在用户自己系统中, 并非Docker container中):
$ curl -s https://packagecloud.io/install/repositories/github/git-lfs/script.deb.sh | sudo bash
$ sudo apt-get install git-lfs
12.2. 获取 model-zoo 模型
在 tpu-mlir_xxxx.tar.gz (tpu-mlir的发布包)的同级目录下, 使用以下命令克隆 model-zoo 工程:
$ git clone --depth=1 https://github.com/sophgo/model-zoo
$ cd model-zoo
$ git lfs pull --include "*.onnx,*.jpg,*.JPEG,*.npz" --exclude=""
$ cd ../
model-zoo的目录结构如下:
├── config.yaml
├── requirements.txt
├── data
├── dataset
├── harness
├── output
└── ...
config.yaml 中包含通用的配置:数据集的目录、模型的根目录等,以及一些复用的参数和命令
requirements.txt 为 model-zoo 的 python 依赖
dataset 目录中包含模型的 imagenet 数据集预处理,将作为 plugin 被 tpu_perf 调用
data 目录将用于存放 lmdb 数据集
output 目录将用于存放编译输出的 bmodel 和一些中间数据
其他目录包含各个模型的信息和配置。每个模型对应的目录都有一个 config.yaml 文件,该配置文件中配置了模型的名称、路径和 FLOPs、数据集制作参数,以及模型的量化编译命令。
如果已经克隆过 model-zoo 可以执行以下命令同步模型到最新状态:
$ cd model-zoo
$ git pull
$ git lfs pull --include "*.onnx,*.jpg,*.JPEG,*.npz" --exclude=""
$ cd ../
此过程会从 GitHub 上下载大量数据。由于具体网络环境的差异, 此过程可能耗时较长。
注意:如果您获得了SOPHGO提供的 model-zoo 测试包, 可以执行以下操作创建并
设置好 model-zoo,完成此步骤后直接进入下一节。
$ mkdir -p model-zoo
$ tar -xvf path/to/model-zoo_<date>.tar.bz2 --strip-components=1 -C model-zoo
12.3. 准备运行环境
安装运行 model-zoo 所需的依赖:
# for ubuntu 操作系统
sudo apt-get install build-essential
sudo apt install python3-dev
sudo apt-get install -y libgl1 # For OpenCV
# for centos 操作系统
sudo yum install make automake gcc gcc-c++ kernel-devel
sudo yum install python-devel
sudo yum install mesa-libGL
# 精度测试需要执行以下操作,性能测试不执行(推荐使用Anaconda等创建python3.7或以上的虚拟环境)
cd path/to/model-zoo
pip3 install -r requirements.txt
另外,运行环境中调用 tpu 硬件进行性能和精度测试,请根据 libsophon 使用手册安装 libsophon。
12.4. 准备数据集
12.4.1. ImageNet
下载 imagenet 2012 数据集 的
ILSVRC2012_img_val.tar(MD5 29b22e2961454d5413ddabcf34fc5622)。
将 ILSVRC2012_img_val.tar 解压到 dataset/ILSVRC2012/ILSVRC2012_img_val 目录中:
$ cd path/to/model-zoo
$ tar xvf path/to/ILSVRC2012_img_val.tar -C dataset/ILSVRC2012/ILSVRC2012_img_val
12.4.2. COCO (可选)
如果精度测试用到了 coco 数据集(如yolo等用coco训练的网络),请按照如下步骤下载解压:
cd path/to/model-zoo/dataset/COCO2017/
wget http://images.cocodataset.org/annotations/annotations_trainval2017.zip
wget http://images.cocodataset.org/zips/val2017.zip
unzip annotations_trainval2017.zip
unzip val2017.zip
12.5. 在非 x86 环境运行性能与精度测试
注意: 如果您的设备是 PCIE 板卡, 可以直接跳过该节内容。
性能测试只依赖于 libsophon 运行环境, 所以在工具链编译环境编译完的模型连同
model-zoo 整个打包, 就可以在 SOC 环境使用 tpu_perf 进行性能与精度测试。
但是, SOC设备上存储有限, 完整的 model-zoo 与编译输出内容可能无法完整拷贝到
SOC 中。这里介绍一种通过 linux nfs 远程文件系统挂载来实现在 SOC 设备上运行测试的
方法。
首先, 在工具链环境服务器『host 系统』安装 nfs 服务:
$ sudo apt install nfs-kernel-server
在 /etc/exports 中添加以下内容(配置共享目录):
/the/absolute/path/of/model-zoo *(rw,sync,no_subtree_check,no_root_squash)
其中 * 表示所有人都可以访问该共享目录, 也可以配置成特定网段或 IP 可访问, 如:
/the/absolute/path/of/model-zoo 192.168.43.0/24(rw,sync,no_subtree_check,no_root_squash)
然后执行如下命令使配置生效:
$ sudo exportfs -a
$ sudo systemctl restart nfs-kernel-server
另外, 需要为 dataset 目录下的图片添加读取权限:
chmod -R +r path/to/model-zoo/dataset
在 SOC 设备上安装客户端并挂载该共享目录:
$ mkdir model-zoo
$ sudo apt-get install -y nfs-common
$ sudo mount -t nfs <IP>:/path/to/model-zoo ./model-zoo
这样便可以在 SOC 环境访问测试目录。SOC 测试其余的操作与 PCIE 基本一致, 请参考下 文进行操作; 运行环境命令执行位置的差别, 已经在执行处添加说明。
12.6. 获取 tpu-perf 工具
从 https://github.com/sophgo/tpu-perf/releases 地址下载最新的 tpu-perf
wheel安装包。例如: tpu_perf-x.x.x-py3-none-manylinux2014_x86_64.whl 。并将
tpu-perf 包放置到与 model-zoo 同一级目录下。此时的目录结构应该为如下形式:
├── tpu_perf-x.x.x-py3-none-manylinux2014_x86_64.whl
├── tpu-mlir_xxxx.tar.gz
└── model-zoo
12.7. 准备工具链编译环境
建议在 docker 环境使用工具链软件,最新版本的 docker 可以参考 官方教程 进行安装。安装完成后,执行下面的脚本将当前用户加入 docker 组,获得 docker 执行权限。
$ sudo usermod -aG docker $USER
$ newgrp docker
然后,在 tpu-mlir_xxxx.tar.gz 目录下(注意, tpu-mlir_xxxx.tar.gz 和
model-zoo 需要在同一级目录), 执行以下命令:
$ tar zxf tpu-mlir_xxxx.tar.gz
$ docker pull sophgo/tpuc_dev:v2.2
$ docker run --rm --name myname -v $PWD:/workspace -it sophgo/tpuc_dev:v2.2
运行命令后会处于Docker的容器中。
12.8. 模型性能和精度测试流程
12.8.1. 模型编译
使用以下命令完成设置运行测试所需的环境变量:
$ cd tpu-mlir_xxxx
$ source envsetup.sh
该过程结束后不会有任何提示。之后使用以下命令安装 tpu-perf:
$ pip3 install ../tpu_perf-x.x.x-py3-none-manylinux2014_x86_64.whl
model-zoo 的相关 confg.yaml 配置了SDK的测试内容。例如: resnet18的
配置文件为 model-zoo/vision/classification/resnet18-v2/config.yaml 。
执行以下命令, 运行全部测试样例:
$ cd ../model-zoo
$ python3 -m tpu_perf.build --target BM1684X --mlir -l full_cases.txt
--target 用于指定芯片型号,目前支持 BM1684 和 BM1684X 。
此时会编译以下模型(由于model-zoo的模型在持续添加中,这里只列出部分模型;同时该 过程也编译了用于测试精度的模型,后续精度测试部分无需再编译模型。):
* efficientnet-lite4
* mobilenet_v2
* resnet18
* resnet50_v2
* shufflenet_v2
* squeezenet1.0
* vgg16
* yolov5s
* ...
命令正常结束后, 会看到新生成的 output 文件夹(测试输出内容都在该文件夹中)。
修改 output 文件夹的属性, 以保证其可以被Docker外系统访问。
$ chmod -R a+rw output
12.8.2. 性能测试
运行测试需要在 Docker 外面的环境(此处假设您已经安装并配置好了1684X设备和 驱动)中进行, 可以退出 Docker 环境:
$ exit
PCIE 板卡下运行以下命令, 测试生成的
bmodel性能。
$ pip3 install ./tpu_perf-*-py3-none-manylinux2014_x86_64.whl
$ cd model-zoo
$ python3 -m tpu_perf.run --target BM1684X --mlir -l full_cases.txt
--target 用于指定芯片型号,目前支持 BM1684 和 BM1684X 。
注意:如果主机上安装了多块SOPHGO的加速卡,可以在使用 tpu_perf 的时候,通过添加
--devices id 来指定 tpu_perf 的运行设备。如:
$ python3 -m tpu_perf.run --target BM1684X --devices 2 --mlir -l full_cases.txt
SOC 设备使用以下步骤, 测试生成的
bmodel性能。
从 https://github.com/sophgo/tpu-perf/releases 地址下载最新的 tpu-perf
tpu_perf-x.x.x-py3-none-manylinux2014_aarch64.whl 文件到SOC设备上并执行
以下操作:
$ pip3 install ./tpu_perf-x.x.x-py3-none-manylinux2014_aarch64.whl
$ cd model-zoo
$ python3 -m tpu_perf.run --target BM1684X --mlir -l full_cases.txt
运行结束后, 性能数据在 output/stats.csv 中可以获得。该文件中记录了相关模型的
运行时间、计算资源利用率和带宽利用率。
12.8.3. 精度测试
运行测试需要在 Docker 外面的环境(此处假设您已经安装并配置好了1684X设备和 驱动)中进行, 可以退出 Docker 环境:
$ exit
PCIE 板卡下运行以下命令, 测试生成的 bmodel 精度。
$ pip3 install ./tpu_perf-*-py3-none-manylinux2014_x86_64.whl
$ cd model-zoo
$ python3 -m tpu_perf.precision_benchmark --target BM1684X --mlir -l full_cases.txt
--target 用于指定芯片型号,目前支持 BM1684 和 BM1684X 。
各类精度数据在 output 目录中的各个 csv 文件可以获得。
注意:如果主机上安装了多块SOPHGO的加速卡,可以在使用 tpu_perf 的时候,通过添加
--devices id 来指定 tpu_perf 的运行设备。如:
$ python3 -m tpu_perf.precision_benchmark --target BM1684X --devices 2 --mlir -l full_cases.txt
具体参数说明可以通过以下命令获得:
python3 -m tpu_perf.precision_benchmark --help
12.9. FAQ
此章节列出一些tpu_perf安装、使用中可能会遇到的问题及解决办法。
12.9.1. invalid command ‘bdist_wheel’
tpu_perf编译之后安装,如提示如下图错误,由于没有安装wheel工具导致。
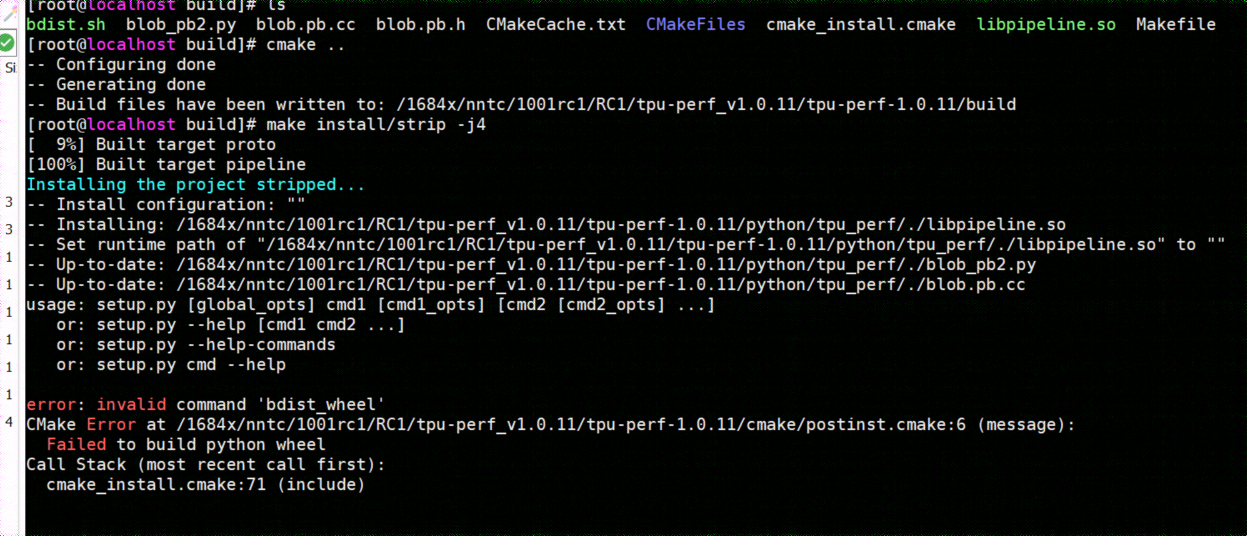
则先运行:
pip3 install wheel
再安装whl包
12.9.2. not a supported wheel
tpu_perf编译之后安装,如提示如下图错误,由于pip版本导致。

则先运行:
pip3 install --upgrade pip
再安装whl包
12.9.3. no module named ‘xxx’
安装运行model-zoo所需的依赖时,如提示如下图错误,由于pip版本导致。

则先运行:
pip3 install --upgrade pip
再安装运行 model-zoo 所需的依赖
12.9.4. 精度测试因为内存不足被kill
对于YOLO系列的模型精度测试,可能需要4G左右的内存空间。SOC环境如果存在内存不足被kill的情况,可以参考SOPHON BSP 开发手册的板卡预制内存布局章节扩大内存。