7. Calibration
7.1. 总体介绍
所谓校准, 就是用用真实场景数据来调校出恰当的量化参数, 为何需要校准?当我们对激活进行非对称量化时, 需要预先知道其总体的动态范围, 即minmax值, 对激活进行对称量化时, 需要预先使用合适的量化门限算法在激活总体数据分布 的基础上计算得到其量化门限, 而一般训练输出的模型是不带有激活这些数据统计 信息的, 因此这两者都要依赖于在一个微型的训练集子集上进行推理, 收集各个 输入的各层输出激活, 汇总得到总体minmax及数据点分布直方图, 并根据KLD等 算法得到合适的对称量化门限threshold, 最后会启用auto-tune算法使用各int8层 输出激活与fp32激活的欧式距离来对这些该int8层的输入激活量化门限进行调优; 上述过程整合在一起, 统一执行, 最后将各个op的优化后的threshold和min/max值 输出到一个量化参数文本文件中, 后续``model_deploy.py``时就可使用这个参数 文件来进行后续的int8量化, 总体过程如(量化总体过程)图
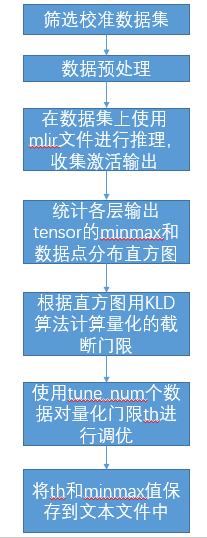
图 7.1 量化总体过程
如下图(量化参数文件样例)为校准最终输出的量化参数文件
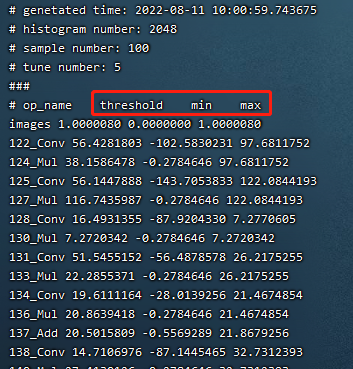
图 7.2 量化参数文件样例
7.2. 校准数据筛选及预处理
7.2.1. 筛选原则
在训练集中挑选约100~200张覆盖各个典型场景风格的图片来进行校准, 采用类似训练数据清洗的方式, 要排除掉一些异常样例;
7.2.2. 输入格式及预处理
格式 |
描述 |
|---|---|
原始图片 |
对于CNN类图片输入网络, 支持直接输入图片, 要求在前面生成mlir文件时, model_transform.py命令要指定和训练时完全一致的图片预处理参数 |
npz或npy文件 |
对于非图片输入或图片预处理类型较复杂tpu-mlir暂不支持的情形, 建议额外编写 脚本将完成预处理后的输入数据保存到npz/npy文件中(npz文件是多个输入tensor 按字典的方式打包在一起, npy文件是1个文件包含1个tensor), run_calibration.py支持直接导入npz/npy文件 |
上面2种格式, 在调用run_calibration.py调用mlir文件进行推理时, 就无需再指定校准图片的预处理参数了
方式 |
描述 |
|---|---|
–dataset |
对于单输入网络, 放置输入的各个图片或已预处理的输入npy/npz文件(无顺序要求); 对于多输入网络, 放置各个样本的已预处理的npz文件 |
–data_list |
将各个样本的图片文件地址, 或者npz文件地址, 或者npy文件地址, 一行放一个样本, 放置在文本文件中, 若网络有多个输入文件, 文件间通过逗号分割(注意npz文件应该只有1个输入地址) |
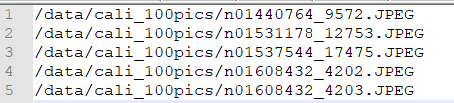
图 7.3 data_list要求的格式样例
7.3. 算法实现
7.3.1. kld算法
tpu-mlir实现的kld算法参考tensorRT的实现, 本质上是将abs(fp32_tensor)这个波形(用2048个fp32 bin的直方图表示),截掉一些高位 的离群点后(截取的位置固定在128bin、256bin…一直到2048bin)得到fp32参考概率分布P, 这个fp32波形 若用128个等级的int8类型来表达, 将相邻的多个bin(比如256bin是相邻的2个fp32 bin)合并成1个int8值等级计算分布 概率后, 再扩展到相同的bin数以保证和P具有相同的长度, 最终得到量化后int8值的概率分布Q, 计算P和Q的KL散度, 在一个循环中, 分别对128bin、256bin、…、2048bin这些截取位置计算KL散度, 找出具有最小散度的截取位置, 这说明在这里截取, 能用int8这128个量化等级最好的模拟fp32的概率分布, 故量化门限设在这里是最合适的。kld算法实现伪码 如下所示:
1the pseudocode of computing int8 quantize threshold by kld:
2 Prepare fp32 histogram H with 2048 bins
3 compute the absmax of fp32 value
4
5 for i in range(128,2048,128):
6 Outliers_num=sum(bin[i], bin[i+1],…, bin[2047])
7 Fp32_distribution=[bin[0], bin[1],…, bin[i-1]+Outliers_num]
8 Fp32_distribution/= sum(Fp32_distribution)
9
10 int8_distribution = quantize [bin[0], bin[1],…, bin[i]] into 128 quant level
11 expand int8_distribution to i bins
12 int8_distribution /= sum(int8_distribution)
13 kld[i] = KLD(Fp32_distribution, int8_distribution)
14 end for
15
16 find i which kld[i] is minimal
17 int8 quantize threshold = (i + 0.5)*fp32 absmax/2048
7.3.2. auto-tune算法
从KLD算法的实际表现来看, 其候选门限相对较粗, 也没有考虑到不同业务的特性, 比如: 对于目标检测、关键点检测等业务, tensor的离群点 可能对最终的结果的表现更加重要, 此时要求量化门限更大, 以避免对这些离群点进行饱和而影响到这些分布 特征的表达; 另外, KLD算法是基于量化后int8概率分布与fp32概率分布的相似性来计算量化门限, 而评估波形相似性的方法 还有其他比如欧式距离、cos相似度等方法, 这些度量方法不用考虑粗略的截取门限直接来评估tensor数值分布相似性, 很多时候 能有更好的表现; 因此, 在高效的KLD量化门限的基础上, tpu-mlir提出了auto-tune算法对这些激活的量化门限基于欧式距离 度量进行微调, 从而保证其int8量化具有更好的精度表现;
实现方案: 首先统一对网络中带权重layer的权重进行伪量化, 即从fp32量化为int8, 再反量化为fp32, 引入量化误差; 然后 逐个对op的输入激活量化门限进行调优: 在初始KLD量化门限和激活的最大绝对值之间, 均匀选择10个候选值, 用这些候选者 对fp32参考激活值进行量化加扰, 引入量化误差, 然后输入op进行fp32计算, 将输出的结果与fp32参考激活进行欧式距离计算, 选择10个候选值中具有最小欧式距离的值作为调优门限; 对于1个op输出连接到后面多个分支的情形, 多个分支分别按上述方法 计算量化门限, 然后取其中较大者, 比如(auto-tune调优实现方案)图中layer1的输出会分别针对layer2、layer3调节一次, 两次调节独立进行, 根据实验证明, 取最大值能兼顾两者;
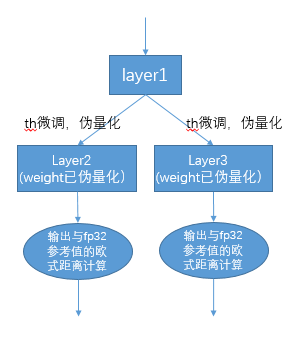
图 7.4 auto-tune调优实现方案
7.4. 示例-yolov5s校准
在tpu-mlir的docker环境中, 在tpu-mlir目录执行source envsetup.sh初始化环境后, 任意新建目录进入执行如下命令可以完成对yolov5s的校准过程:
1$ model_transform.py \
2 --model_name yolov5s \
3 --model_def ${REGRESSION_PATH}/model/yolov5s.onnx \
4 --input_shapes [[1,3,640,640]] \
5 --keep_aspect_ratio \ #keep_aspect_ratio、mean、scale、pixel_format均为预处理参数
6 --mean 0.0,0.0,0.0 \
7 --scale 0.0039216,0.0039216,0.0039216 \
8 --pixel_format rgb \
9 --output_names 350,498,646 \
10 --test_input ${REGRESSION_PATH}/image/dog.jpg \
11 --test_result yolov5s_top_outputs.npz \
12 --mlir yolov5s.mlir
参数 |
描述 |
|---|---|
model_name |
模型名 |
–model_def |
模型类型文件(.onnx,.pt,.tflite or .prototxt) |
–model_data |
指定模型权重文件,为caffe模型时需要(对应’.caffemodel’文件) |
–input_shapes |
输入的形状,例如[[1,3,640,640]](二维数组),可以支持多个输入 |
–resize_dims |
要调整到的原始图像的大小。 如果未指定,它将调整为模型的输入大小 |
–keep_aspect_ratio |
调整大小时是否保持纵横比。 默认为False。 设置时不足的部分会补0 |
–mean |
图像每个通道的平均值。 默认为 0.0,0.0,0.0 |
–scale |
图像每个通道的scale。 默认为 1.0,1.0,1.0 |
–pixel_format |
图像类型,可以是 rgb、bgr、gray 或 rgbd |
–output_names |
输出的名称。 如果未指定,则使用模型的输出,否则使用指定的名称作为输出 |
–test_input |
用于验证的输入文件,可以是图像、npy 或 npz。 如果不指定则不会进行验证 |
–test_result |
输出文件保存验证结果 |
–excepts |
验证过程中要排除的网络层名称。 用逗号分隔 |
–debug |
如果打开调试,则立即模型文件将保留; 或将在转换完成后删除 |
–mlir |
输出mlir文件名(包括路径) |
1$ run_calibration.py yolov5s.mlir \
2 --dataset $REGRESSION_PATH/dataset/COCO2017 \
3 --input_num 100 \
4 --tune_num 10 \
5 -o yolov5s_cali_table
参数 |
描述 |
|---|---|
mlir_file |
mlir文件 |
–dataset |
校准数据集 |
–data_list |
input列表 |
–input_num |
校准图像数量 |
–tune_list |
tuning用到的input列表 |
–tune_num |
tuning的图像数量 |
–histogram_bin_num |
指定 kld 计算的直方图 bin 数量 |
-o |
输出门限表 |
–debug_cmd |
debug命令,可以选择校准模式;“percentile9999”采用99.99分位作为初始门限。“use_max”采用绝对值最大值作为门限。“use_torch_observer_for_cali”采用torch的observer进行校准。 |
执行结果如下图(yolov5s_cali校准结果)所示
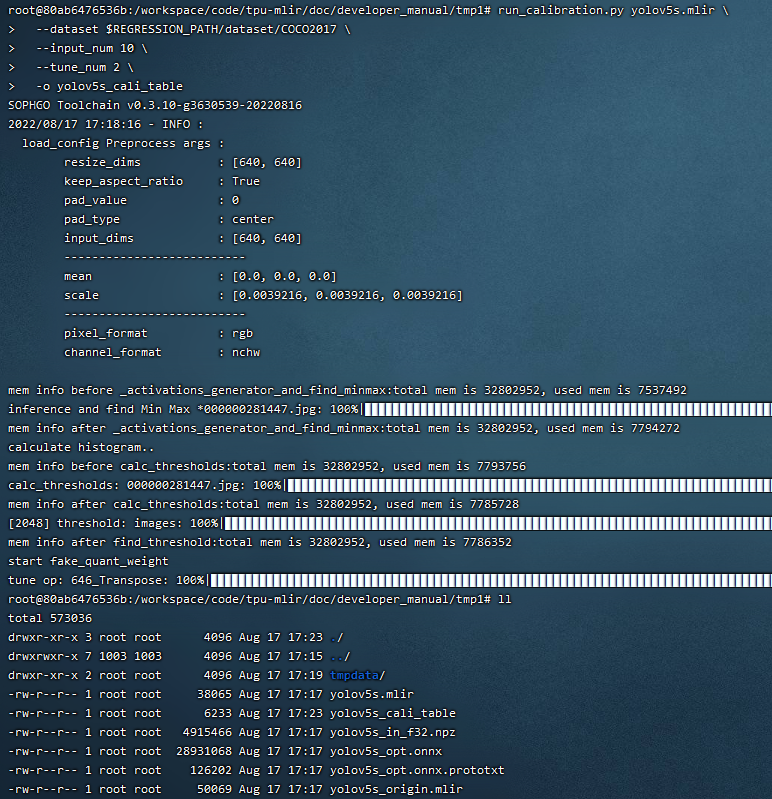
图 7.5 yolov5s_cali校准结果
7.5. 可视化工具visual说明
可视化工具visual.py可以用来比较量化网络与原始网络的数据相似性,有助于在量化后精度不够满意时候定位问题。此工具在docker中启动,可以在宿主机中启动浏览器打开界面。 工具默认使用tcp端口10000,需要在启动docker时候使用-p命令映射到宿主机,而工具的启动目录必须在网络所在目录。命令启动方式如下图所示:

参数 |
描述 |
|---|---|
–port |
服务程序的TCP监听端口,默认值为10000 |
–f32_mlir |
量化前的浮点mlir网络的文件名, 此文件为model_transform生成,一般为netname.mlir,是初始float32网络 |
–quant_mlir |
量化后的定点mlir网络的文件名,此文件为model_deploy生成,一般文件名为netname_int8_sym_tpu.mlir,生成bmodel用的_final.mlir不适用此工具。 |
–input |
运行网络比较的输入样本数据,可以是jpeg图片文件或者npy/npz数据文件,一般可使用网络转换时的test_input |
–manual_run |
浏览器客户端打开时是否自动运行网络进行数据比较,默认为true,使用此参数则只显示网络结构 |
在浏览器地址栏输入localhost:9999可以打开程序界面,启动时候会自动进行浮点网络和量化后网络的推理,所以可能会有一定时间的等待。如下图所示:

- 上图中使用淡蓝色细线框出了界面的几个区域,除浏览器地址栏之外,程序界面主要显示了:
当前工作目录,指定的浮点网络和量化后网络;
精度数据总结区
layer属性显示区域
网络图形化显示区
tensor数据对比区
tensor数据分布和信息总结显示区(切换tab页面)
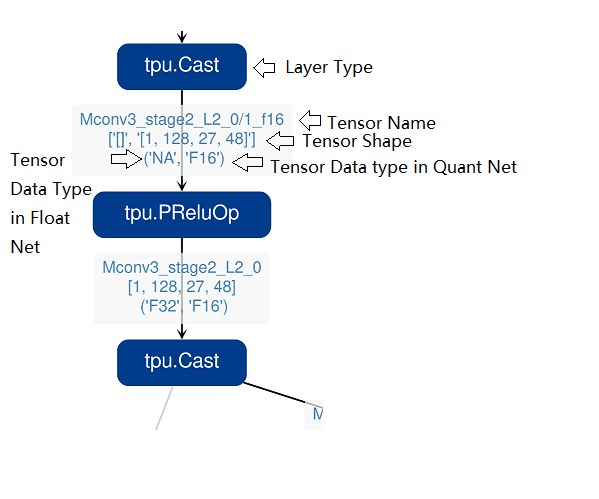
鼠标在网络显示区滚动可以放大和缩小网络显示,鼠标悬停或者点击节点可以在layer属性显示区中显示此layer的属性列表,点击layer之间的连线(也就是tensor),可以在tensor数据对比区显示此tensor的量化前后数据对比。 点击精度数据显示区中的点或者列表中的tensor或者layer,会在网络中定位到这个选中的layer或者tensor。 需要注意的一点是由于网络是基于量化后网络显示,可能会相比浮点网络有变化,对于浮点网络中不存在的tensor会临时用量化后网络的数据替代,表现出来精度数据等都非常好,实际需要忽略 而只关注浮点和量化后网络都存在的tensor,不存在的tensor的数据类型一般是NA,shape也是[]这样的空值。 另外在deploy网络的时候如果没有使用 –debug 参数,一些可视化工具需要的中间数据和文件会被默认清除,造成可视化工具运行不正常,需要增加 –debug 选项重新生成。
tensor上的信息解读如下: