11. 常见问题¶
11.1. Proc讯息解读¶
Linux: # cat /proc/mipi-rx
Alios: # proc_mipi_rx
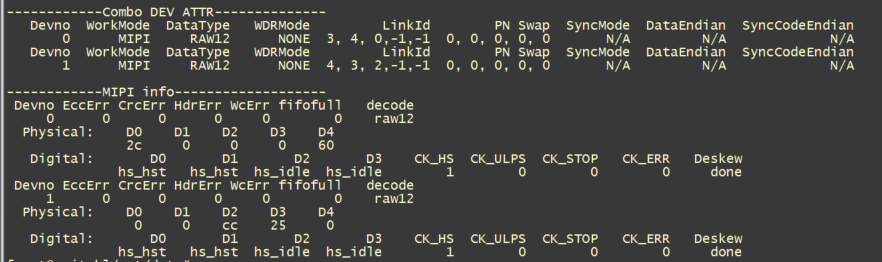
Combo DEV ATTR主要是对sensor的接口配置信息:
Devno: sensor编号,0表示sensor0,1表示sensor1, 目前最大只支持2路sensor同时输入
WorkMode:表示哪种接口类型(mipi/sublvds/ HISPI /BT656…)
DateType:表示sensor数据格式(raw8/raw10/raw12/ YUV422_8BIT…)
WDRMode:wdr模式(none表示非wdr,常见wdr mode:VC, DT, Manual)
LinkId: lane线序配置
PN swap:PN反转,如果有反转,要将该lane配置成1
SyncMode/DataEndian/SyncCodeEnddian:对于mipi接口不支持因此无需配置,对于sublvds、hispi则需要配置
MIPI INFO主要是mipi-rx解析到的信息:
EccErr、CrcErr、HdrErr、WcErr: 如果不为0表示有出现Ecc,crc,wc等校验相关err,需要检查 lane mapping的正确性、mipi时序、lane硬件电路等。
Fifofull:如果不为0表示mac速率太慢,需要提升mac clk.
Decode:表示解析出的数据l类型(Raw12/raw10/raw8/YUV422…)
PhySical:D0-D4表示lane总线上的数据,进入hi speed state后,D0-D4会有数据跳变。
Digital:D0-D4显示进入hi speed state后的每条data lane状态。CK_HS、CK_ULPS、CK_ERR、Deskew表示clk lane状态,正常情况下CK_HS=1,其余的为0,但是非continues clk的情况下也会跳出 CK_HS=1,CK_STOP=1。
11.2. Sensor 相关log开启¶
Linux操作
开启cif drv log:
echo "module cvi_mipi_rx +p" > /sys/kernel/debug/dynamic_debug/control
dmesg -n 8
开syslog打印:
输出到串口屏幕
/sbin/syslogd -l 8 -s 2048 -O /dev/console
或者输出到文件
/sbin/syslogd -l 8 -s 2048 -O /mnt/data/mw.txt
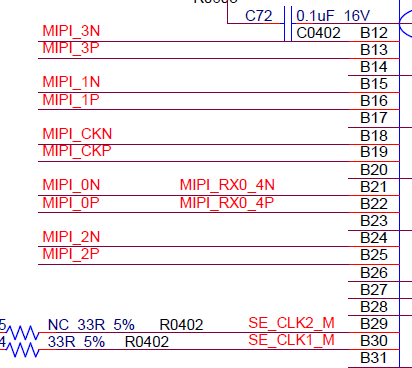
11.3. 如何配置lane线序¶
注意我们要配置的lane id要以sensor为参照物来配置,lane_id数组的索引号表示的是Sensor的Lane ID, 索引号0表示sensor clock,索引号1~4表示sensor lane 0~3。
land_id数组的值表示的是soc的MIPI-Rx的Lane ID, 0表示MIPIRX1_PAD0,1表示MIPIRX1_PAD1, 未使用的lane将lane_id配置成-1。
假设sensor和soc的lane接线如下图所示,对应的lane id配置就是{3,4,2,0,1}.
sensor
soc

SENSOR管脚 |
IPI Lane管脚 |
|---|---|
MIPI_CK (index = 0) |
MIPIRX0_3 (value = 0) |
MIPI_0 (index = 1) |
MIPIRX0_4 (value = 1) |
MIPI_1 (index = 2) |
MIPIRX0_2 (value = 2) |
MIPI_2 (index = 3) |
MIPIRX0_0 (value = 3) |
MIPI_3 (index = 4) |
MIPIRX0_1 (value = 4) |

11.4. 如何选择MAC频率¶
MAC表示isp接收sensor数据的频率,
公式MAC_Freq * pix_width = lane_num * MIPI_Freq * 2。
MAC_Freq:VI MAC的工作频率
pixel_width:像素位宽
lane_num:MIPI lane个数
MIPI_Freq:每条lane的工作频率
假设MAC freq为400M,pixel_width = 12,lane_num = 4,可支持最快MIPI_Freq = 400 * 12 / ( 4 * 2) = 600MHz。
其中MIPI_Freq是表示phy_clk,值是bps/2。比如sony imx335规格是1188Mbps每lane, phy_clk = 1188/2=594Mhz。
反之,如果sensor给出了data rate,我们要能算出合适的mac freq.
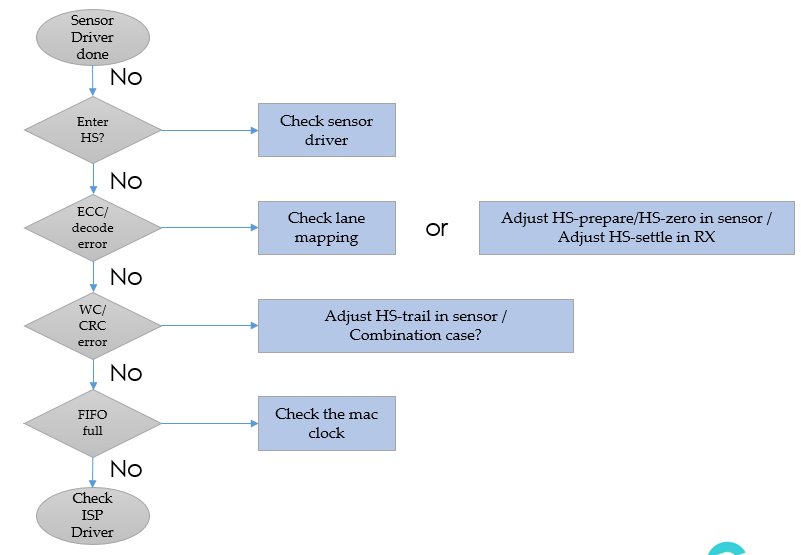
11.5. 错误检查流程¶
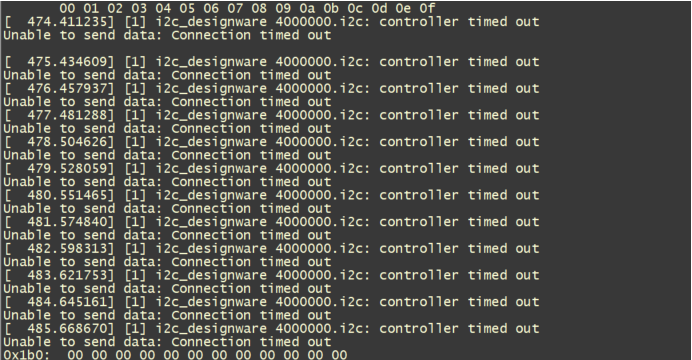
11.5.1. I2C Write Fail¶
sensor i2c属性确认
检查I2C bus id
检查I2C slave addr
检查sensor寄存器的addr/data位宽(8bit or 16bit)
位宽配置不正确一般会报time out 错误
检查 hardware是否正常
确认配置中的rst, pwdn, mclk引脚配置正确
Linux操作命令:
echo "snsr_on 0 1 1" > /proc/mipi-rx //1表示37.125M, 2表示25M, 3表示27M
echo "snsr_on 1 1 1" > /proc/mipi-rx //1表示37.125M, 2表示25M, 3表示27M
echo "snsr_r 0 0" > /proc/mipi-rx
echo "snsr_r 1 0" > /proc/mipi-rx
Alios操作命令:
执行sensor test后输入255退出
用i2cdetect -y –r N命令测试i2c能否检测到。N表示sensor对应的i2c端口(Alios使用iic detect N 命令)
检查power on时序是否满足spec要求(示波器测量mclk,i2c)
11.5.2. Decode err¶
cat /proc/mipi-rx(Alios 执行proc_mipi_rx),查看proc讯息,先看是否有进入hs-state, 当sensor驱动起来后会从low power state进入high speed state。
如下图,如果mipi-rx的D0-D4有数据,并且一直跳变,则说明有进入hs-state。
确认i2c通路(i2cdetect能够扫出sensor 地址)
确认lane线序正确
如果proc中的data lane没有数据跳变,并且伴随CK_HS为0,表示clk lane没找对(请确认clk lane)
如果proc中的data lane有数据跳变,伴随CK_HS为1,表示clk lane找对了,已进入hs模式,这时如果出现ecc、crc等错误,这时表示data lane没配置对(请确认data lane)
确认时序
若前两点都确认正确,但还CK_HS =0,data lane没有数据跳变,可能是时序上未能满足进入hs的条件,此时可以调整加大hs-zero, hs-trail 数值,拉长detect period。
若前两点都确认正确, CK_HS =1,data lane有数据跳变, 但是还是有ecc、crc等err,则可能是 Hs-settle的设定太大或是太小,压到后面的data。
确认hw是否损坏
11.5.3. ECC err¶
检查 lane Id mapping
检查sensor tx hs-zero/hs-prepare
hs-zero、hs-parepare要从sensor spec中确定是多少或者直接问sensor厂商,一般不建议调整。
检查mipi-rx hs-settle
当hs-settle的时间太长会压到data中的“sync code” ,就会出现“sync code” 解析不到,导致ecc err。
调整hs-settle可以直接修改xxx_cmos_param.h如下,填入正确的hs_settle。

Linux操作:调整hs-settle也可以直接ctrl+z跳出,用devmem 命令修改寄存器0x0300b048的bit[23:16]数值,调整完后输入fg跳回程序。
devmem 0x0300b048 32 0xXYZ

11.5.4. CRC err/Word count err¶
调整sensor tx hs-trail,如果hs-trail拉的太快,有可能会压到后面的data,导致数据丢失,从而出现crc err和wc err,需要调整sensor 的hs-trail寄存器设定。

11.5.5. vi_select timeout¶
cat /proc/mipi-rx显示是否有i2c、decode、ecc、crc、wc等err.
如果前面4个步骤都已经确认无误后,
cat /proc/cvitek/vi_dbg检查是否出现WidthGTCnt、WidthLSCnt、HeightGTCnt、HeightLSCnt,如果有这类报错表示sensor init setting中的crop size和给到isp的设定不一致,请对照sensor spec确认修改。
检查MAC clock是否太低 , 如果mac clock太低,会导致isp处理速度太慢出现fifo full,也会导致timeout。