2. Sensor驱动介绍¶
2.1. 硬件架构¶
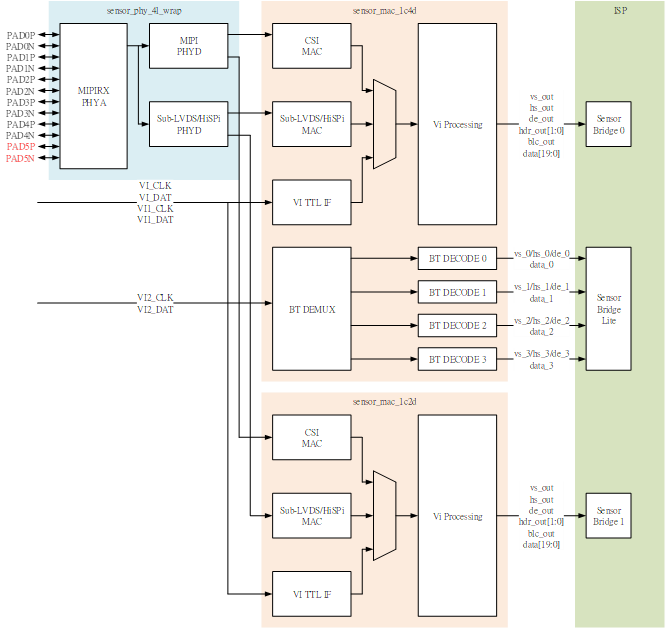
数据流向大致为:Sensor->PHYA -> PHYD -> MAC(CSI/sub-LVDS/TTL)->ISP的CSI BDG。
Sensor吐出lane总线上的差分信号,PHYA用来接收组装差分信号,然后经过PHYD转换成pixel数字信号,最后结合MAC clk sync出frame数据经过VI处理送往ISP做进一步处理。
2.2. sensor库结构¶
Sensor 库结构如下图,一般包括 4 个文件:xxx_cmos.c、xxx_sensor_ctl.c、xxx_cmos_param.h、xxx_cmos_ex.h。
在alios中,sensor库位于 mars_alios/components/cvi_mmf_sdk/cvi_sensor/ 之中
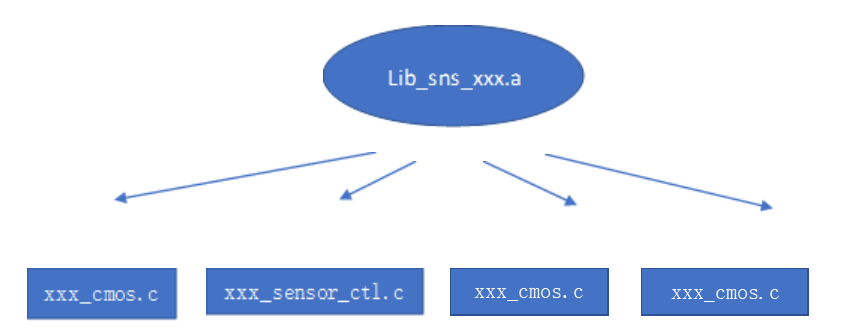
xxx_cmos.c 包含 Sensor 驱动的主要功能函数,里面实现了Sensor 相关的 AE控制相关函数、ISP 默认配置、Sensor 启动模式选择函数、Sensor 向 AE、AWB、ISP 注册和反注册函数、SnsxxxObj;
xxx_sensor_ctl.c 主要包含 Sensor 的初始化序列、通讯接口初始化、读写函数实现;
xxx_cmos_ex.h 是一些结构体、分辨率、模式类型等定义声明的头文件。
xxx_cmos_param.h 主要是sensor属性参数, mipi属性参数, isp noise profile的配置。
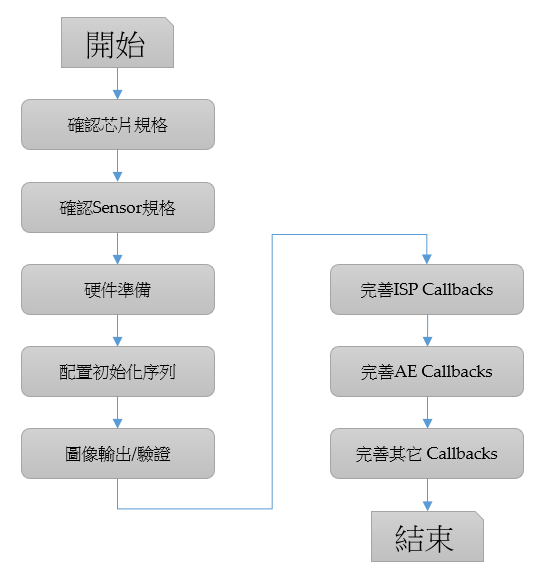
2.3. 调试流程¶